智能驾驶测试中的“鬼探头”场景,核心是测试车辆在行人或车辆从视觉盲区突然穿出时,全链路的安全应对能力。这种场景模拟了现实中最危险的突发状况,对车辆的感知、决策和控制都提出了极限挑战。

当目标被障碍物遮挡时,车辆必须依靠多种传感器协同工作来“看见”。例如,一些路口预警方案结合了毫米波雷达、高清视觉相机和激光检测器,通过“雷达+视觉+激光”的三重校验,声称能将“鬼探头”检测准确率提升至100%。
但仅靠车端传感器存在物理极限,因此测试也考察车辆能否利用路侧感知体系。像盐城的“智路”项目,通过在道路旁部署激光雷达、微波雷达和高精度摄像头,构建“3D+3感”的全息路端感知网络,与车端感知融合,旨在从根本上消除盲区。这意味着车辆能提前获得超视距信息,避免措手不及。
决策:毫秒级的“大脑”一旦感知到危险,系统必须在极短时间内做出正确判断。这依赖于算法快速预测目标轨迹并评估风险。核心是计算TTC(预计碰撞时间),并根据TTC值划分风险等级:低风险(TTC≥3秒)、中风险(1.7秒≤TTC<3秒)、高风险(TTC<1.7秒),分别触发不同级别的预警,从文字提示到紧急制动提醒。
然而,“鬼探头”的难点在于观测数据不足——目标突然出现,历史轨迹缺失。研究显示,在斯坦福无人机数据集中,仅有瞬时观测的行人出现频率达2.22次/秒。
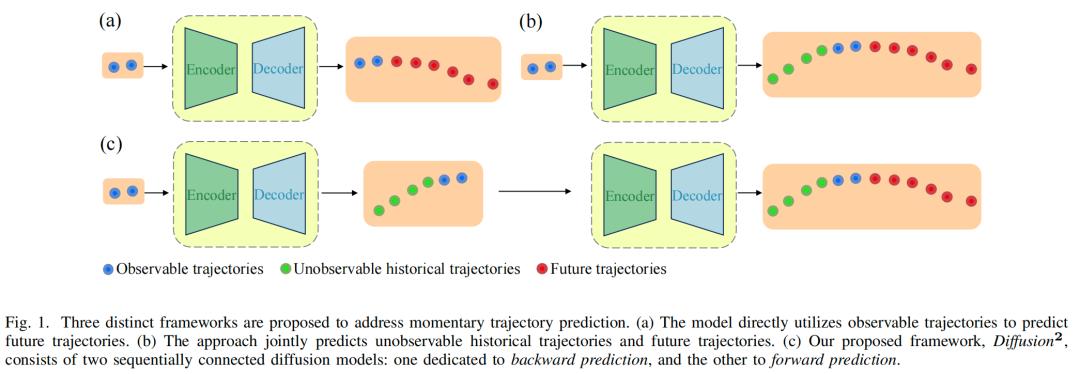
为此,像Diffusion²这样的双扩散模型被开发出来,专门破解瞬时轨迹预测难题,通过反向生成历史轨迹来补充上下文,再正向预测未来运动。
正确的决策需要被精准执行,尤其在恶劣路况下。“鬼探头”测试常结合低附着路面场景,比如湿滑路面。在盐城试验场,湿操控测试路的路面附着系数被稳定控制在0.6,水膜厚度精确到1毫米±0.5毫米,模拟真实雨天的打滑风险。

车辆在这里进行紧急制动或避让时,必须保持车身稳定,避免侧滑或失控。重庆的“三位一体”智能驾驶实验室更进一步,能全天候模拟冰雪、湿滑路面,并精准还原“鬼探头”等高危突发场景。通过高精度转毂系统调节摩擦力,实验室让车辆在室内安全地经历极限考验,验证其控制系统的可靠性和实时性。
通过这些测试,智能驾驶车辆才能在实际道路上安全应对类似风险,让“鬼探头”不再成为驾驶噩梦。