立体巡检是一种融合多源感知技术的智能化监测模式,其核心在于空天地协同与多模态数据融合:
1、定义与组成
根据国家电网标准,立体巡检是以可视化巡检(通道监控)和无人机巡检为主,结合机器人、卫星遥感、移动终端等形成的协同体系,实现"全域覆盖、全时感知"。
技术架构包含四层:
感知层:无人机搭载多光谱/激光雷达传感器、地面IoT传感器
传输层:5G网络实现实时数据传输
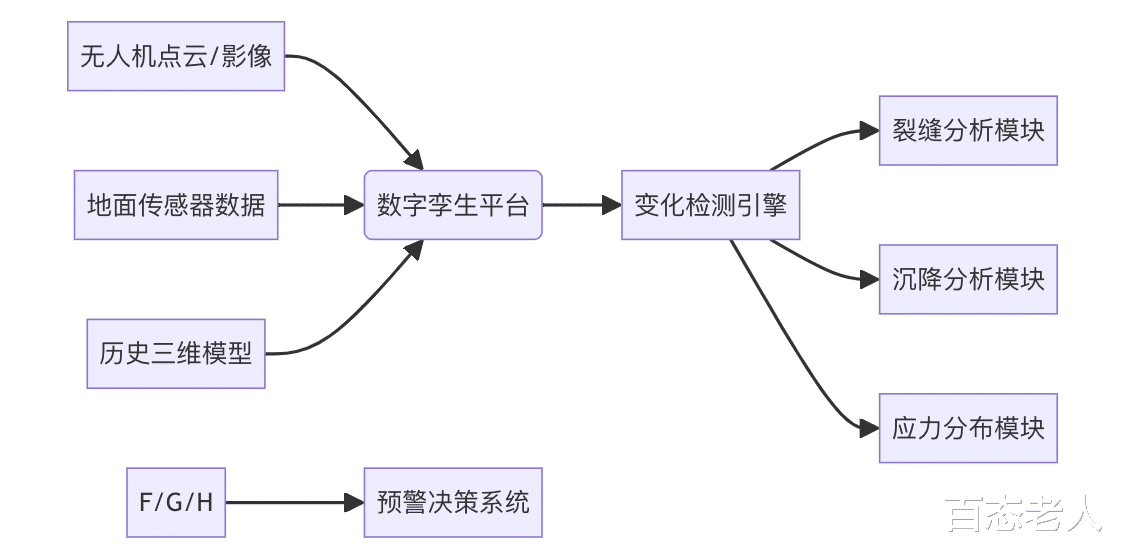
平台层:数字孪生引擎(如山海鲸Cetus3D)构建三维模型
应用层:AI分析系统实现自动诊断与预警
2、技术协同逻辑
无人机负责大范围快速扫描(15分钟完成人工1小时任务量),地面传感器提供连续定点监测(如静力水准仪测沉降),二者数据通过数字孪生平台比对历史模型,实现毫米级精度变化检测。
二、无人机多光谱扫描技术解析1、技术原理多光谱成像机制:
通过捕捉紫外线至红外线波段(400-2500nm)的光谱反射特征,识别肉眼不可见的物质成分差异。例如:
近红外波段可检测植被覆盖下的建筑裂缝
热红外波段感知结构渗水导致的温度异常

传感器融合技术:
结合激光雷达点云与多光谱影像,生成 高精度数字表面模型(DSM) ,空间分辨率达厘米级,解决传统摄影测量在复杂立面的数据缺失问题。
2、建筑病害检测能力
核心算法:
点云差分分析:通过ICP(迭代最近点)算法对齐多期点云,识别毫米级位移
深度学习识别:CNN网络自动标注裂缝形态(如宽度、走向)
机理仿真:结合有限元模型预测沉降发展趋势
2、预警响应流程以北京老旧房屋监测为例:
每小时自动采集卫星+无人机+传感器数据
平台比对数字孪生基准模型,计算倾斜/沉降速率
触发三级预警:
黄色预警:沉降>5mm,短信通知巡检人员
橙色预警:裂缝扩展速率>0.1mm/天,启动AI复检
红色预警:结构形变超限,自动联动应急平台疏散人员
四、山海鲸未来社区项目的技术落地1、系统架构创新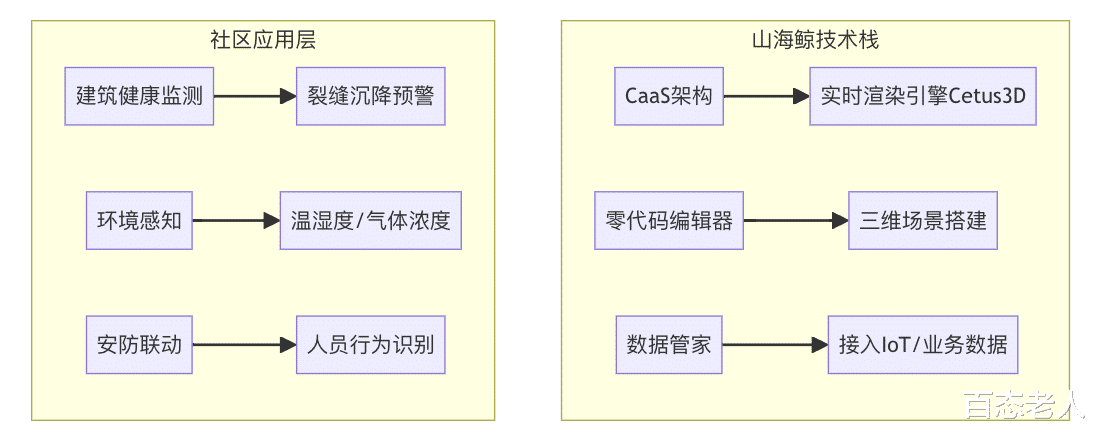
三大核心技术:
自研渲染引擎:游戏级光影效果模拟建筑昼夜变化
CSaaS架构:支持BS/CS模式无缝切换,适配大屏/移动端
多源数据融合:整合社区安防摄像头、环境传感器、物业系统
2、 核心功能模块建筑健康监护
无人机季度扫描生成社区实景模型,自动标注裂缝/沉降区域
重点建筑部署光纤传感器,实时监测微振动
预警闭环管理
告警事件自动生成维修工单,推送至物业系统
历史数据追溯功能支持养护决策(如材料老化评估)
3、实施成效在成都某社区试点中:
裂缝识别响应时间缩短70%
人工巡检成本降低60%
暴雨灾害期间处理30万条监测数据,支撑应急决策
五、技术挑战与发展趋势现存挑战数据融合瓶颈:多源异构数据时空对齐误差(如无人机与传感器采样频率差异)
算力约束:大规模点云处理需边缘计算协同
标准缺失:建筑病害评级尚未形成统一规范
未来方向1、智能体协同:
无人机集群自主充电+任务分配
巡检机器人进入管道/室内盲区
2、数字孪生进化:
引入物理机理模型(如混凝土碳化仿真)实现预测性维护
元宇宙交互:AR头盔实时叠加结构应力云图
3、城市级应用:
扩展至桥梁/电网等基础设施群监测
对接城市CIM平台构建全域安全图谱
结论立体巡检通过“无人机多光谱扫描+数字孪生平台”重构了城市建筑监测范式:
技术突破:多光谱传感器实现非接触式病害识别,数字孪生引擎完成“采集-比对-预警”闭环
产业价值:山海鲸等项目验证了该模式在提升效率(>50%)、降低成本(>60%)方面的可行性
社会意义:为城市更新、灾害防控提供科学支撑,推动基础设施管理从“被动抢险”向“主动防护”转型
未来需突破多智能体协同与数字孪生深度仿真技术,最终构建“感知-认知-决策”一体化的智慧城市健康监护系统。