zcnitional 175 2024-04-01 15:44 雷达本身就是一种视觉,不是吗,你摄像头现阶段还不能做到全天候的高分辨能力,逆光,大雾环境就瞎了,为啥飞机要用雷达而不用几个摄像头,为啥雷达叫超视距,视觉的方向本来就是雷达,所谓的纯视觉只是一种狭隘的感光元件影像形式的片面视觉而已,终将被淘汰……[静静吃瓜] halo 回复 04-01 20:42 有道理。什么纯视觉,就是僵硬地照搬人体感官到机器上,不能发挥雷达的作用,不是进步而是退步。 小小晟 回复 04-01 20:49 所谓纯视觉不是人类的视觉,而且远超地球所有生物的超视觉。他识别的是车上所以摄像头像素点,不是人类眼睛的焦点。
摸鱼儿 127 2024-04-01 11:33 能把偷工减料省成本说得这么清新脱俗也是脸够厚的! 愁落暗尘 回复 浩然老爸47 04-01 23:49 特斯拉的智能驾驶也不行呀 浩然老爸47 回复 04-01 19:40 马斯克也是这么说
开拓者的眼光 97 2024-04-01 16:33 摄像头和雷达是自动驾驶和机器人的眼睛,算法才是核心,看不清楚,自动驾驶没有用的,不用讨论,激光雷达+摄像头才是方向!纯视觉没有前途! 开拓者的眼光 回复 arsenal_93 04-01 17:28 需要毫米波雷达,甚至今后会出现更多的新型雷达,目标是实现三维世界完全数据化,本质特征明确化!不仅自动驾驶,在军事领域也大有用武之地! arsenal_93 回复 04-01 17:02 不用毫米波雷达吗?雨雾天能看清?
嘿君 67 2024-04-01 12:25 雷达是给视觉算法错误的托底,是如图气囊一样的安全底线,一味吹捧视觉算法简直是居心叵测,为了降本丧良心 阿康 回复 用户10xxx07 04-01 18:23 就看近期问界用户发出来的高速路,大雨天气的那几个应急视频就知道,视觉是不够用的。人眼都看不出来。而且,视觉很容易被欺骗的。 用户10xxx07 回复 04-01 16:06 雷达可以应对恶劣天气造成的视觉障碍…纯视觉遇上大雾,团雾,雨雪,冰雹之类的恶劣天气受影响太大了…
阿宝raymond 48 2024-04-01 12:31 放屁,纯视觉方案在十年之内就是渣,人工智能不发展到一定阶段纯视觉方案就是巨坑,特斯拉不止一次识别错误,连幽灵都识别出来了 小小晟 回复 04-01 15:32 总要有人改变世界,迈出第一步 用户10xxx07 回复 小小晟 04-01 16:07 你知道为嘛要发明雷达吗?雷达的超视距探测,你觉着不如摄像头的图像识别?
流浪猫 40 2024-04-01 13:40 雨雪雾天,视觉系统能看见啥?上热像仪? 琴师 回复 整顿网络风气 传播正能量 04-01 15:46 路况不好为啥别人能用,你就慢慢开?这叫技不如人 整顿网络风气 传播正能量 回复 04-01 14:49 雨雪雾天难道不应该减速自己慢慢开吗?路况不好你敢用自动驾驶?
闹市隐者 39 2024-04-01 19:17 激光和雷达可以做到全波段探测,纯视觉在夜晚 周围物体不发光的时候就盲目了。另外视觉很难准确判断距离。特斯拉曾把白色墙当成空气,高速翻到的厢式货车白色车顶无法被视觉识别
hairuibeijing 38 2024-04-01 21:07 摄像头+100万行代码=59.9元成本,10个雷达+1万行代码=5.99万元成本, 说白了就是视觉更省钱。 用户10xxx42 回复 04-02 13:39 放到10w台车 代码的价格被无限稀释 你在偷换概念 奋斗不息的岁月 回复 04-02 09:49 不太可能,算100万行用的算力比一万行用的算力是几何成长!CpU、GDU可比雷达贵多了!
糖醋柠檬 35 2024-04-01 11:27 纯视觉怎么应付鬼探头[滑稽笑] 和平使者 回复 小小晟 04-01 17:37 提前发现有人在路边,适当减速或者换车道。鬼探头麻烦就是没有能提前发现 小小晟 回复 04-01 15:34 这个物理惯性,没有人能解决,速度快了就是事故。
阿迪飞 23 2024-04-01 15:18 同意雷军,人没有声呐系统,现在用车上也是靠转成图片去看。人眼发达,做更强的视觉系统符合我们本身的逻辑算法。无人驾驶的突破是算力,如果突破不差激光雷达这点托底。车本来就是靠视觉在路上跑的,太依赖其他感官不伦不类。 L.A 回复 04-01 16:59 高配为什么会有雷达?你这是在打雷大善人的脸么?? 花吃了那个女孩 回复 04-01 16:45 那就等突破了再买纯摄像的不就完了?你说你没突破,没突破你在说个啥?
大牛比较懒 23 2024-04-01 12:39 雨天怎么办?高速上前车卷起来的水雾可以让人都看不到路 用户10xxx07 回复 用户16xxx53 04-01 16:17 同样是车企,同样是自动驾驶,别的车恶劣天气一样可以开,你的车只能人工介入?那我为嘛还要为你的不足买单? 用户16xxx53 回复 04-01 14:38 特殊情况自已开嘛
惠州用户 18 2024-04-01 13:15 雷达能看两三百米,视觉能行,视觉算法总会有识别错误的时候,有时一次出错就能要命,雷达是发收,有障碍就能测出来 用户10xxx07 回复 04-01 16:19 最重要的是纯视觉受恶劣天气的影响非常大…
月夜猫 18 2024-04-01 21:20 无论是雷达方案还是视觉方案,本质上都是单机解决方案。这都是智驾的第一阶段,网络化控制、区域集群协调指挥,才是未来的最终形态。 茂茂 回复 04-02 18:31 对 到时候6g突破 全部车联网 加视觉和雷达才是 现在网络速度达不到车做不到毫米级反应 到时候马路上行驶如果行人横穿马路违规直接判责 法律更完善 如果全都是网络控制无人驾驶阶段 到时候人穿马路就像过现在火车道一样 火车撞人没有火车的责任 那时候过马路一样的道理
学而瑞思 11 2024-04-01 15:20 不懂就问:雷达一定需要和高清地图捆绑吗?或者纯视觉就不和高清地图关键吗? 用户10xxx07 回复 04-01 16:18 雷达和高清地图对照,再加上纯视觉对照比对出周围的各种移动或者固定物是什么东西… asdfghjkkl 回复 04-01 17:59 高清地图本身就应该是AI大模型,不断发展以更加高清。
求佛不如拜我 10 2024-04-01 17:02 你不懂,在路上画一堵墙,你纯视觉试试能不能过 zcnitional 回复 04-01 18:38 应该是,在墙上画一条路,估计纯视觉穿过去了[哭笑不得]
邀月三人醉 8 2024-04-01 19:48 所以华为的自动驾驶在没有5G网络的时候不能用。而特斯拉自动驾驶不需要高速网络。华为的需要后台计算驾驶路线超车不超车,而特斯拉车载芯片自己就能计算。华为相当于远程后台遥控驾驶, 大嘴 回复 04-01 22:56 谁说华为自动驾驶需要5g网络?高速路上很多时候都没有网络,国产智驾一点问题都没有 蜗牛 回复 04-02 08:59 真有钱,买了一台特斯拉,又买了一台问界,就为对比两辆车性能吗?
kyj13wctv 5 2024-04-01 22:32 人靠纯视觉,有盲区,所以容易出错,智能驾驶还要走这个老路是不是傻啊,当然是多重感知更好了。在天文学,在航空航天,多波段探测都是最优方案,真正看清了宇宙的全貌。视觉识别强,主要原因就是节约成本,毕竟雷达贵,但这只是现阶段而已,雷达用的多,自然技术会迭代,成本会降低,之后必然出现一个平衡点,就是依靠增加算法算力带来的识别准确率提升与雷达之类辅助探测手段增加的成本之间形成一个平衡。
caffeecat 3 2024-04-01 16:46 激光雷达判断是否有障碍物更精准。视觉算法本身就有局限性,可见光雨雾穿透力差,光污染或者炫光导致无法识别,人类进化这么久,还是有视错觉,在AI上是相同的,就不是难度问题。雷布斯可能是想和特斯拉一样降成本。
Aiyantsl 3 2024-04-01 16:07 只能说他连雷达是什么都不知道,看看现在的军事图片都是什么拍的,无知不可怕,可怕的事还说出来 万里乌云 回复 04-01 18:03 你错了,这是无知?这是拿消费者傻子耍。就算他不懂,手下那么多工程师会不懂?呵呵 飘来一阵风 回复 万里乌云 04-01 18:19 从猴王嘴里说出来,还真要呵呵一下
曾经沧海难为谁 2 2024-04-02 10:41 以后的雷达会像手机摄像头一样有好几个,什么可见光的,什么毫米波的,什么红外的,什么夜视的,什么紫外的……到时候机器看世界就像铁血战士的视角,没准都能看到阿飘呢
都是借口 2 2024-04-02 08:49 未来肯定是复合方案!单一识别总会有局限和盲区,比如前方有个特殊的障碍,某些单一识别模式如果识别成其他东西甚至没有识别,那不是嫌自己活的太久吗,其实汽车完全可以参考战斗机座舱的发展,比如很快就会普及的各种辅助显示其实就跟战斗机上面的衍射显示器差不多,最新的四代机都可以进行一定语音控制,还有战斗机上面的各种传感器各种规划控制功能,等到技术成熟成本降下来,各种雷达以及光学复合模式毫无疑问才是必然的,现在所谓的技术路线争论,不过是厂商技术达不到又必须要小白鼠和资金而已
大风起兮 2 2024-04-02 09:01 什么纯视觉,国内软硬件一起上不好吗?雷总没自己核心技术,才在那里大肆贬低其他车商,特期拉纯视觉方案用普通摄像头做眼睛,国内车商加上激光雷达做眼睛,不更先进,不是视觉,把个偷工减料说得高大上,傻子才信,那可是要命的东西
开哥 2 2024-04-02 12:57 自己做不到就说别人作弊,话说别人能一目十行,过目不忘,考上清华。人家就是作弊呗?不去补足自己的短处,盯着别人的长出贬低,我就想看看,到时候你使用视觉+激光雷达的时候,这脸打的 怎么圆回来
山涧听水 2 2024-04-02 11:04 真正的无人驾驶是既不用摄像头,也不用雷达,而是用一种障碍物传感器,什么雨呀雾呀风呀都能分辨出级别,达到一定级别就发出警告,放慢速度,达到危险级别就就近找地方泊车。
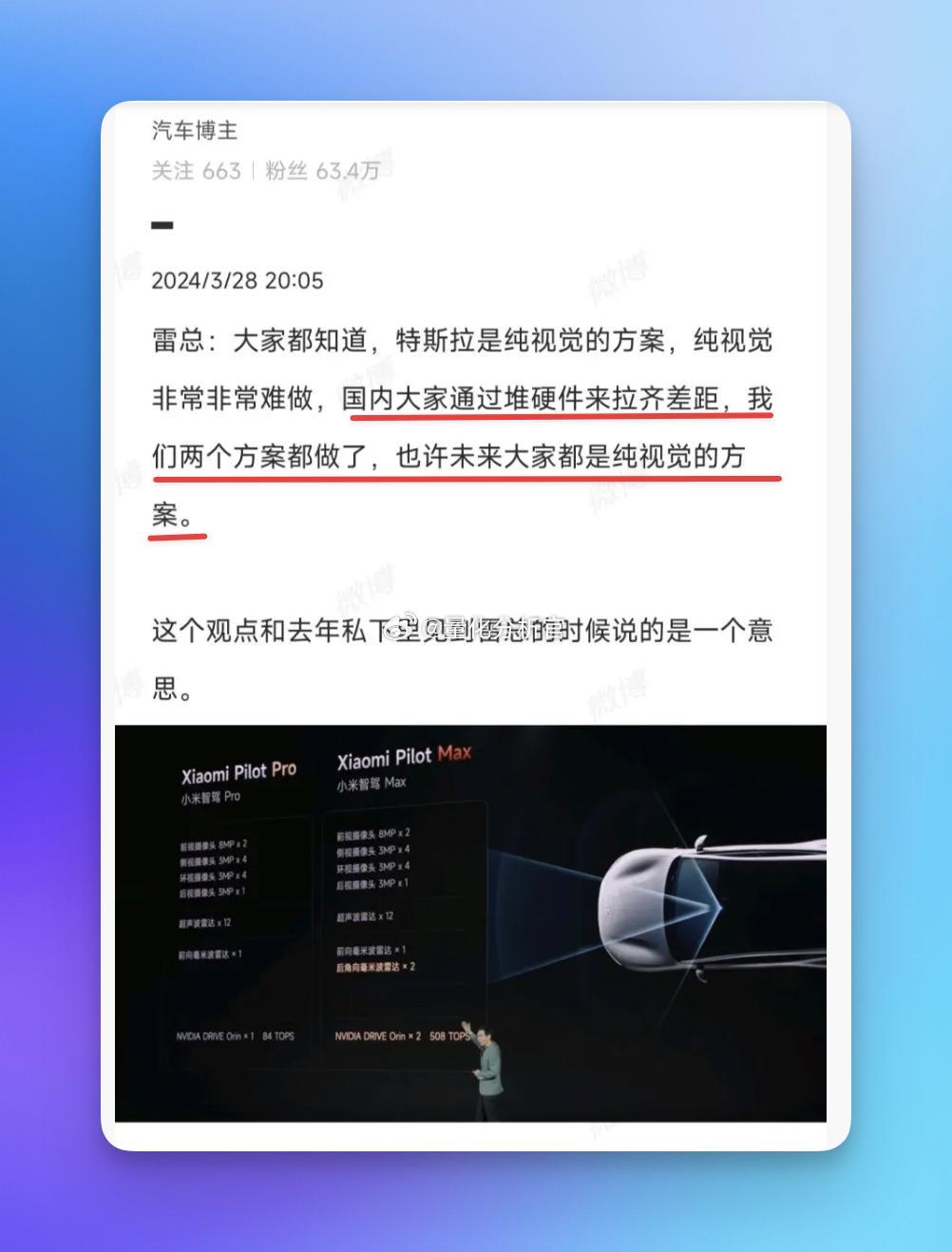
澹泊明志宁静致远 1 2024-04-01 14:43 小米su7与华为问届M5智驾硬件对比图 用户10xxx07 回复 04-01 16:23 牛逼牛逼,赶紧去买粗粮! 还拿轿跑和SUV同价位对比… 雷氏对比法可真好用! 123 回复 04-01 18:12 回去赶紧把激光雷达拆了
用户10xxx90 1 2024-04-02 21:56 雷军原话说纯视觉是最难的。 这不等于纯视觉是好的,所以雷军把纯视觉放低端车了。为啥,纯视觉低端。 为什么难,你让智商低身体不健康的人去通过大量补课考上清华北大肯定是最难的。 你让高智商,天赋异禀的人努力学习考清北肯定容易。 纯视觉就是资本家为了节约成本收割用户,让弱智去考清北。
评论列表