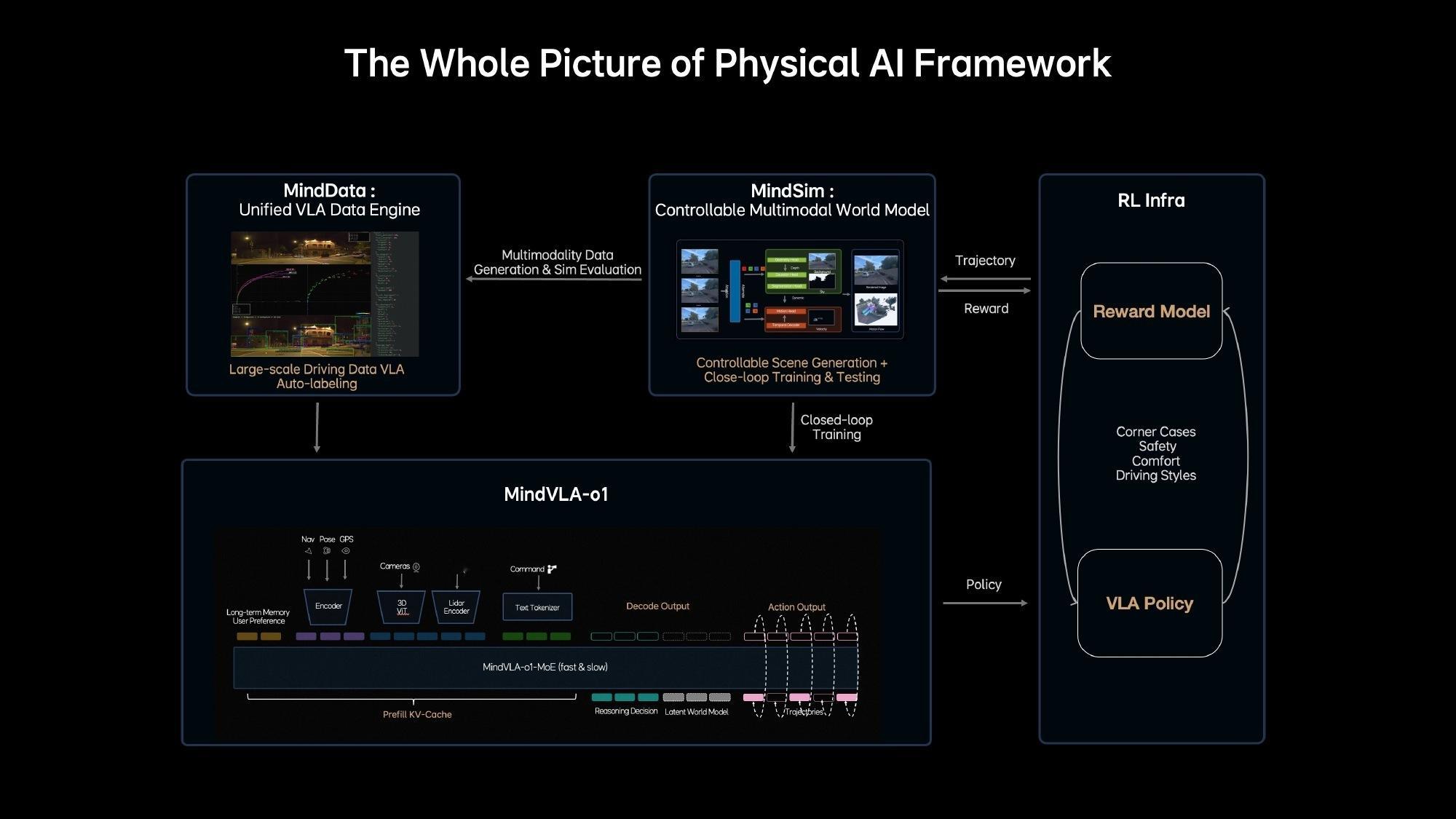
理想这个MindVLA-o1,同一套模型既能开车又能操控机器人,真的有种汽车正在被重新定义的感觉。
以前我们总觉得智能汽车就是给车装上更好的传感器、更快的芯片,本质上还是在造车的框架里打转。但这次理想把自动驾驶和机器人共用一套VLA模型,说明在他们眼里,车应该是具备物理世界理解能力的智能体。
这让我想到一个更深层的变化,当车能真正理解三维空间,能看懂语义,能像人一样通过经验建立对距离和速度的直觉,它就从一个被驾驶的工具,变成了可以协作的伙伴。以后可能不是我开车去上班,而是我的车和我一起出门。
而且车和机器人共用模型这件事,其实挺有想象空间的。以后你在车上积累的每一次训练,可能都在为未来的家庭机器人打基础。技术的复用和迁移,往往比我们想象中更快。
说实话,以前觉得自动驾驶只是解放双手,现在看,它可能是在为物理AI时代铺路了。理想全能辅助驾驶来了