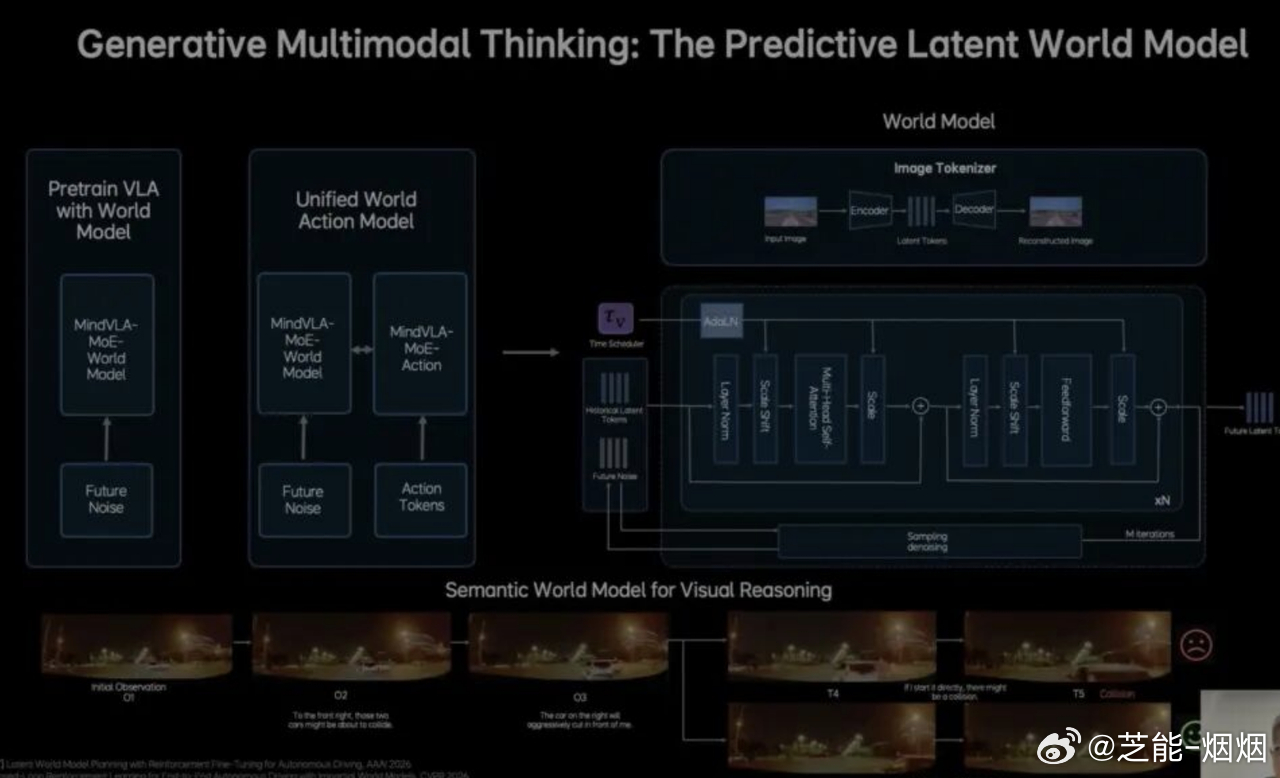
2026 年自动驾驶与机器人路线之争白热化,GTC 上核心分歧聚焦:是走 VLA 短链路直接拟合驾驶动作,还是用世界模型预测环境物理状态。前者落地快、延迟低,但泛化有限;后者理解物理规则,天花板更高但算力压力大。
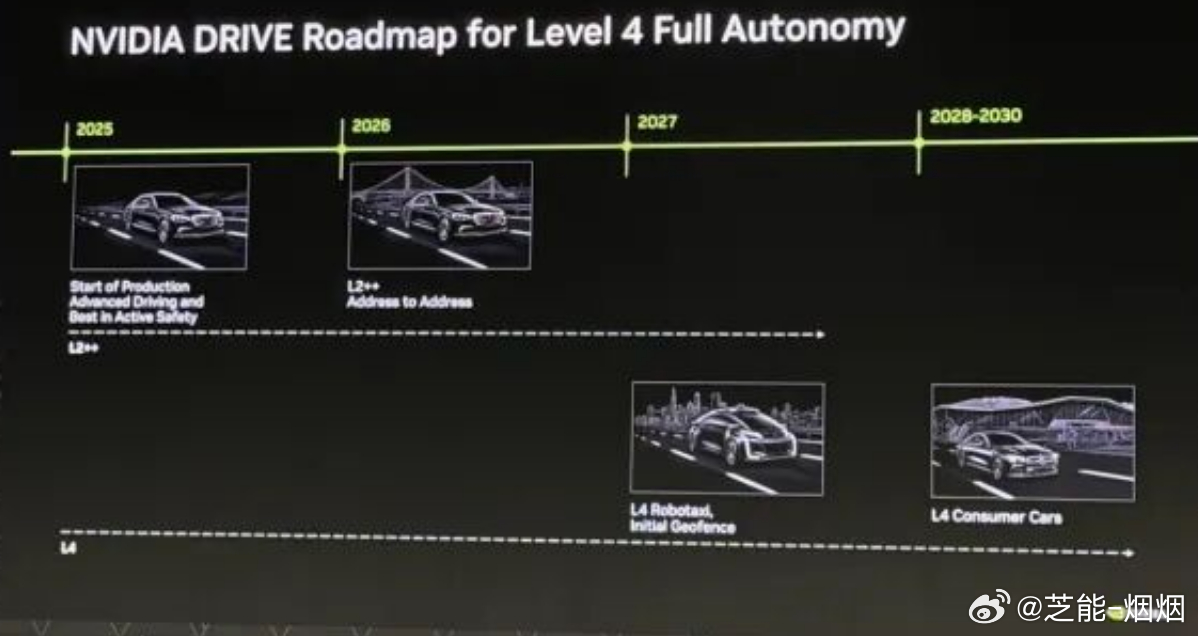
行业正被数据、推理、系统三大闭环卡脖子,虚实结合生成场景、隐空间压缩、混合架构兜底成为主流解法。两条路线正快速融合,走向分层协同架构。短期 3 年 VLA 主导量产落地,长期 10 年世界模型决定上限,最终能把融合架构做稳的才会胜出。
2026 年自动驾驶与机器人路线之争白热化,GTC 上核心分歧聚焦:是走 VLA 短链路直接拟合驾驶动作,还是用世界模型预测环境物理状态。前者落地快、延迟低,但泛化有限;后者理解物理规则,天花板更高但算力压力大。
行业正被数据、推理、系统三大闭环卡脖子,虚实结合生成场景、隐空间压缩、混合架构兜底成为主流解法。两条路线正快速融合,走向分层协同架构。短期 3 年 VLA 主导量产落地,长期 10 年世界模型决定上限,最终能把融合架构做稳的才会胜出。