技术巡猎 岚图 电动汽车自动充电设备及其控制方法、电动汽车充电站---岚图,也开始,搞充电机械臂了。
机械臂是很酷的,“会自己插枪”一想就是很酷,不过这个专利解决的是落地时最麻烦的几个问题。比如说,停车位本来就紧张,人在车边会走动,车身还会有轻微姿态变化,到了地下车库的环境,机械臂的活动就很困难了。
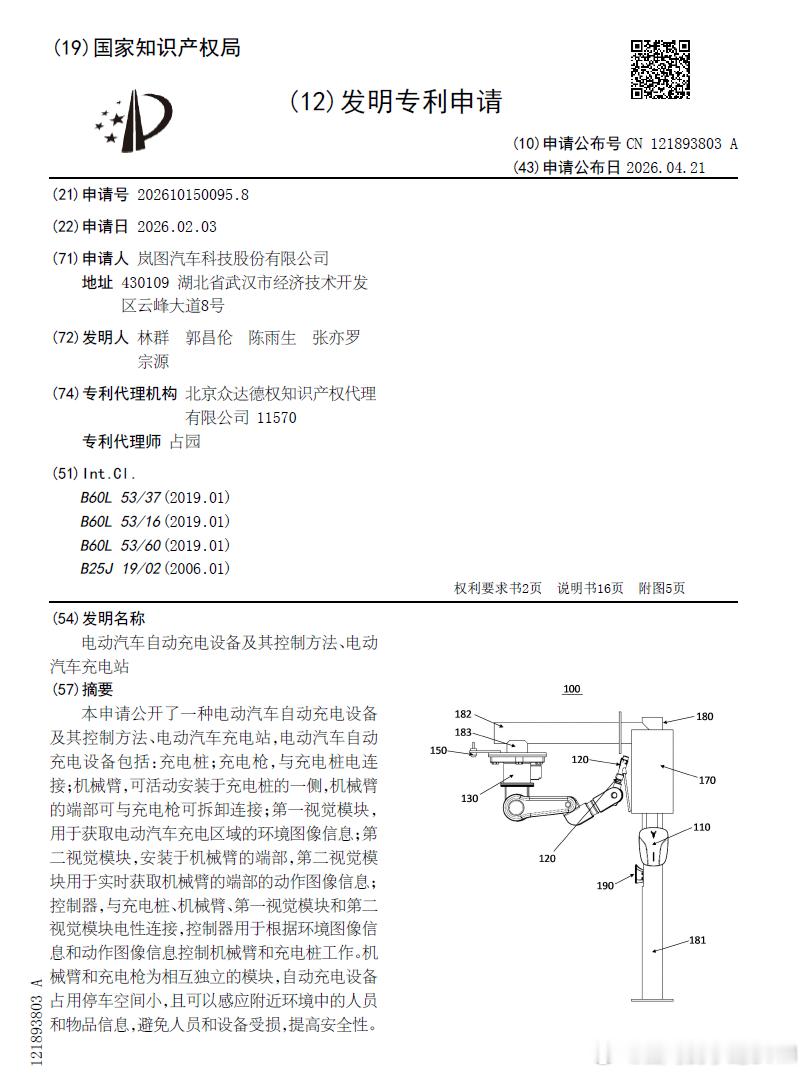
这件专利的思路里,它没有让机械臂一直拎着充电枪待命,机械臂和充电枪可以拆成两个独立模块,平时枪放在枪座上,机械臂收在一边;需要充电的时候,机械臂再过去把枪“接”起来,完成插枪动作;对接完成后,机械臂和充电枪分离,机械臂回到初始位置;充满以后再回来拔枪、归位。
这个结构比“全程抓枪”的方案多了一步,实际上是在主动规避真实场景里的机械风险。因为一旦用户在充电过程中上下车,车身高度会有一点点变化,如果机械臂始终和枪硬连接,整套机构就可能被别住,轻则卡死,重则变形、损坏。岚图这个方案本质上是在给系统留余量。
它也不是靠一个机械爪粗暴夹住充电枪。专利里做了两层连接。第一层是定位件和配合部,简单理解就是先把位置找准;第二层是连接件和固定部,再把它锁住。文中写到了定位销、配合孔、转轴、连接部、腰型孔这些细节。因为自动插枪最怕的就是“位置不够准”。先定位,再固定,机械臂动作就不用一上来赌一次到位,整个系统的容错会高很多。
更重要的是,它做了双视觉。一个视觉模块看大环境,负责识别充电区域里有没有人、有没有异物、有没有足够的活动空间;另一个视觉模块直接装在机械臂末端,盯着末端动作、充电枪位置和连接状态,边动边修正。这个设计把“全局安全”和“局部精定位”拆开做了处理。前者解决的是能不能动,后者解决的是怎么动得准。
控制逻辑也比较完整。车辆发出充电信号或者充电完成信号后,系统先看环境,再判断机械臂有没有动作条件。如果条件不满足,直接报警,不冒进。条件满足后,还不会立刻插枪,它还要先给车辆发送充电口盖打开信号,再通过视觉确认盖板是不是真的打开了。如果没开,就继续重发信号;如果连续多次还没开,就进入故障处理。
站端布局也值得一说。它把设备布置在相邻两个车位之间,一套系统服务两个车位。并且在机械臂收拢状态下,充电桩、机械臂、视觉模块和控制器这些核心部件都尽量抬高,和地面的间距大于等于1.7米,减少对停车、开门、上下车的影响。
如果从行业意义上看,这件专利最重要的价值,主要是把自动补能往真正可部署的方向推了一步。今天自动泊车已经越来越成熟,车自己找车位这件事,大家慢慢都能接受了。但补能环节一直卡在最后一下,车停得再好,还是得人下车拿枪。这个断点如果一直在,所谓“自主补能闭环”就不完整。岚图这套方案想补的,正是这一刀。