现代多电飞机努力用电力系统替代沉重复杂的气压和液压回路,让整机变得更轻、更高效。作为其中的核心技术,一体化起动/发电机不仅要能在低速下输出大扭矩,带动航空发动机完成起动,还要在中高速时从发动机提取能量,稳定地给机上电网供电。这就要求电机必须同时具备高功率密度、高可靠性和出色的容错能力。

在众多电机类型里,永磁辅助同步磁阻起/发电机(PMaSynRS/G)因为独特的结构脱颖而出。它并不像纯永磁同步电机那样完全依赖昂贵的永磁体,而是利用转子交、直轴磁路不对称所产生的磁阻转矩来出力。
这样一来,电机在保持高功率密度的同时,恒功率运行范围更宽,而且由于永磁磁链较小,短路时产生的危险电流也更低,符合航空应用对故障容错的严苛要求。同无刷电励磁同步电机相比,它的本体和控制器都更简单;同开关磁阻电机相比,它的转矩脉动更小、效率更高。
要让这样一台电机精确运转,离不开位置传感器提供的转子角度信息,控制系统据此实施矢量控制。可现实安装中,传感器与转子磁场轴线之间难免存在一个微小的机械角度差,这就是零位偏差。每次更换电机、控制器或者维修拆装,这个偏差都可能改变,需要重新校准。
别小看这点偏差,它会让原本该注入d轴或q轴的电流出现分量串扰,直接拉低电机的效率和峰值转矩。在重载起动和高速弱磁这类苛刻工况下,偏差带来的影响还会被进一步放大,甚至威胁系统的稳定运行。

业界常用的一种校准方法是预定位法:向定子绕组注入一个固定方向的电流矢量,转子在电磁转矩的吸引下,会转到一个平衡位置停下。读取此时位置传感器的测量值,同指令角度比对,就得到了零位偏差。这方法原理简单、不依赖额外设备,但精度容易受到轴承摩擦等干扰转矩的影响,转子实际停住的位置会偏离理想平衡点。
如果把预定位法直接用在PMaSynRS/G上,问题会变得更加棘手。这类电机的永磁转矩分量较小,磁阻转矩分量却占据主导。在稳定平衡点附近,磁阻转矩的方向恰好与永磁转矩相反,非但不能帮转子对准电流矢量,反而会把它推开,导致定位精度明显恶化。而且随着定位电流增大,平衡点的位置和稳定性还会发生复杂变化。以往文献大多针对表贴式永磁同步电机,并未考虑磁阻转矩的介入,也缺少对摩擦转矩影响的定量建模。
针对这一空缺,电能高密度转换全国重点实验室(华中科技大学)的谭越瑾、孔武斌等研究者开展了系统研究。
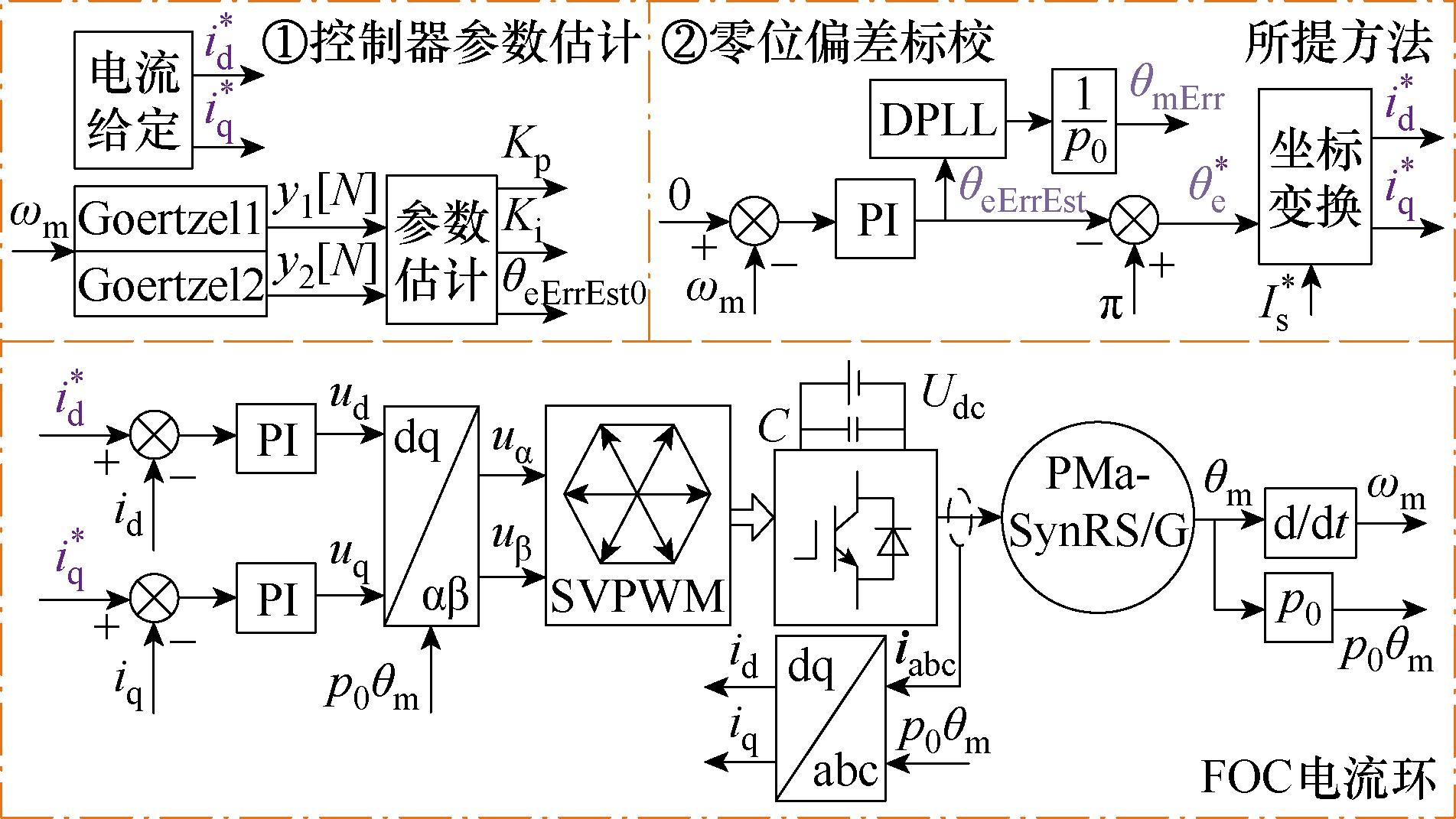
图1 基于不稳定平衡点的零位偏差标校方法结构框图
他们深入分析了磁阻转矩分量对预定位平衡点位置和精度的具体影响,进而推导出摩擦转矩所导致的角度误差近似公式。有了这个公式,就可以根据电机实际参数,理性选择定位电流和定位点,把摩擦带来的不利影响降到最低。
研究者充分利用PMaSynRS/G的转矩特性,提出了一种基于不稳定平衡点的零位标校方法。
常理上我们习惯让转子停在稳定平衡点,可那里磁阻转矩和永磁转矩互相拆台。若是将转子推向一个不稳定平衡点,两种转矩的方向反而变得一致,能合力共同抵抗摩擦转矩。
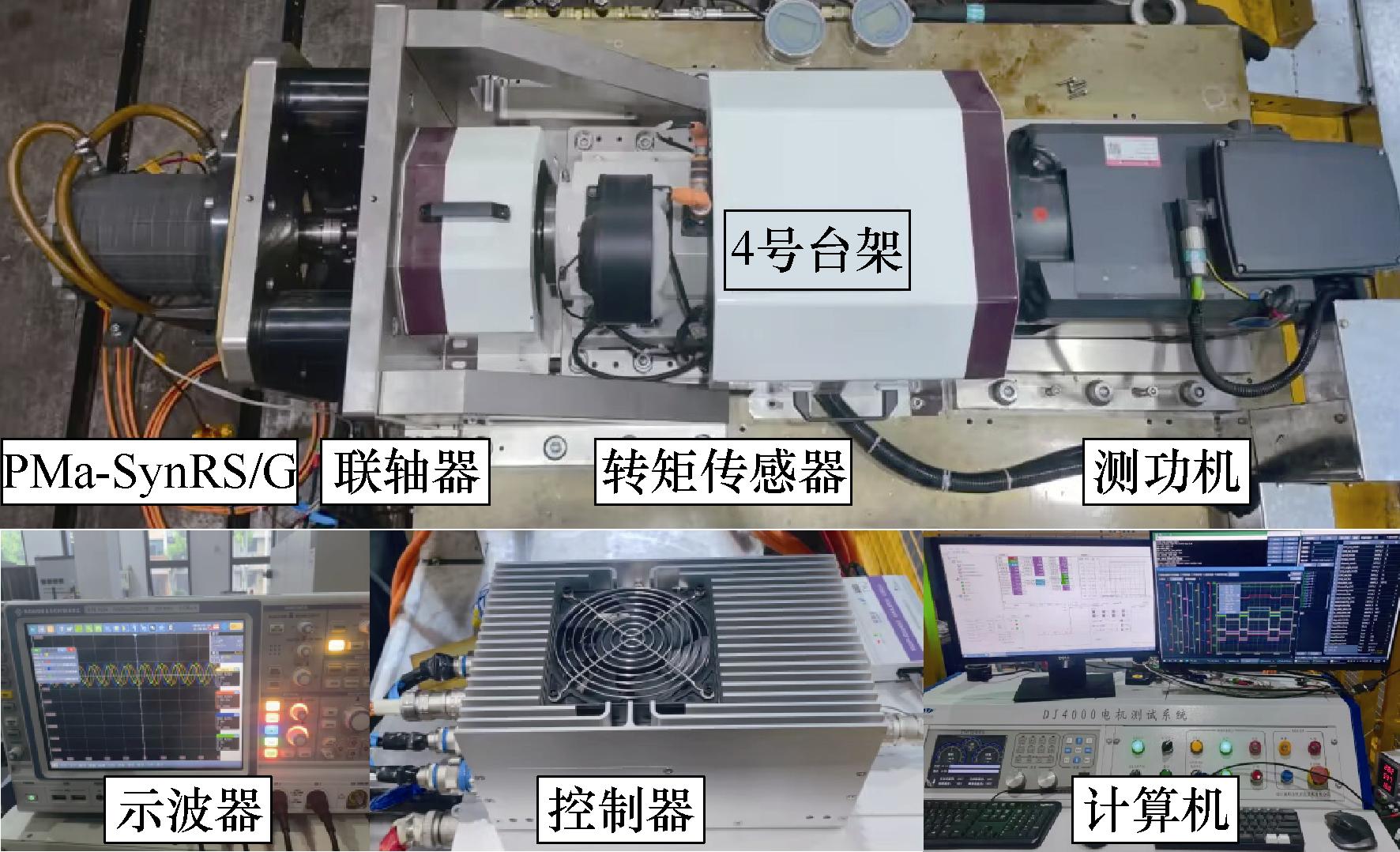
图2 实验平台
具体的实现策略是通过PI控制器将转子动态地维持在那个不稳定的位置上,同时完成位置信息的读取。这套方法无需增加任何硬件,标校流程仅需选定三个参数,他们还给出了控制器参数的估计办法,兼顾了工程上的简便与鲁棒。
实验平台上的测试表明,所提出的误差估算模型能够准确预测定位偏差,新方法得到的零位偏差校正误差被有效抑制,精度相较于传统预定位法有显著提升。整套方法利用了电机固有的矩角特性,适用于转子能够自由运动的场景。
在未来,研究者计划进一步拓宽其适用范围,让这种兼顾精度与便捷性的方案,有望在更多类型航空电驱系统中发挥作用,为多电飞机的可靠运行多添一层保障。
本工作成果发表在2025年第14期《电工技术学报》,论文标题为“永磁辅助同步磁阻起/发电机位置传感器零位标校方法”。本课题得到国家自然基金的支持。