对于柔性直流输电(VSC-HVDC)系统的振荡问题,理论研究和工程实际均表明,可通过降低控制延时大幅改善换流器阻抗特性,降低发生振荡的可能性。南京南瑞继保电气有限公司、国网直流技术中心、国网浙江省电力有限公司舟山供电公司的邹强、张国华、刘卓锟、刘黎、随顺科,在2025年第12期《电气技术》上撰文针对柔性直流输电系统的延时测量方法展开研究,介绍柔性直流输电系统的控制分层与控制各环节对频带的影响,提出柔性直流输电的控制系统链路延时、阀控系统链路延时及全链路延时的测试方法。以江苏如东柔性直流输电工程试验为例,给出控制系统链路延时、阀控系统链路延时及全链路延时的测试结果,结果证明了所提方法有效。
与陆地风电相比,海上风电具有机组运行稳定、单机容量较大、能量产出大、年利用小时数高,以及不占用陆地宝贵的土地资源等优势。从全球范围来看,自20世纪90年代以来,经过多年的探索,海上风电技术已日趋成熟,装机容量稳定持续上升。相关研究表明,对于离岸距离超过73 km、容量大于1.4 GW的海上风电项目,相比交流输电,柔性直流输电更具经济性和可靠性。德国、英国已经将柔性直流输电技术作为远海大容量风电接入的主要技术,国际能源署(International Energy Agency, IEA)发布的《2019年海上风电展望》显示,到2040年海上风电有望成为欧洲的主要电力来源。
海上风电通过柔性直流输电接入,通常包括风电机组、海底电缆、海上升压站、交流高压电缆、海上柔性直流换流站、直流电缆、陆上柔性直流换流站、连接交流电网的线路,最终实现海上风电送入交流电网。其中,柔性直流输电系统的主要构成为陆上换流站、直流输电线路及海上换流站。
海上风电接入至少包括风机变流器和柔性直流换流器两种不同的换流器,在运行过程中因为电力电子设备的快速控制特性,若换流器一次参数与换流器控制系统设计不合理,将导致变流器系统呈现负阻抗特性,可能造成整个系统呈现负阻抗特性,从而引起系统振荡。
过大的延时导致换流器在较低的高频段呈现负阻抗特性,使其对系统振荡阻尼减弱甚至放大振荡。理论研究和工程实际均表明,在工程应用过程中出现的柔性直流振荡问题,可以通过降低控制延时大幅改善换流器阻抗特性来缓解。有文献指出优化数字控制延时受硬件条件的制约,有文献在现有硬件条件下改善系统响应特性,有文献对柔性直流阀控(valve based control, VBC)系统链路延时进行分析与测试。本文提出一种柔性直流输电系统的延时测试方法,以便分析柔性直流振荡问题,设计并改进柔性直流控制系统。
1 典型柔性直流输电工程概述
本文以国内首个将柔性直流输电技术运用于海上风电的江苏如东柔性直流输电工程为例进行研究。该工程位于江苏省南通市,直流电压±400 kV,额定功率1 100 MW,2021年12月投运。江苏如东柔性直流输电工程示意图如图1所示,3座海上风电场装机容量分别为400 MW、400 MW、300 MW,每座风电场分别建设1座220 kV海上升压站,风电经过海上升压站升压后分别通过两回220 kV海缆接入海上换流站。海上换流站将电能整流为直流后,通过一回108 km(其中海缆99 km)的高压直流电缆送至陆上换流站。
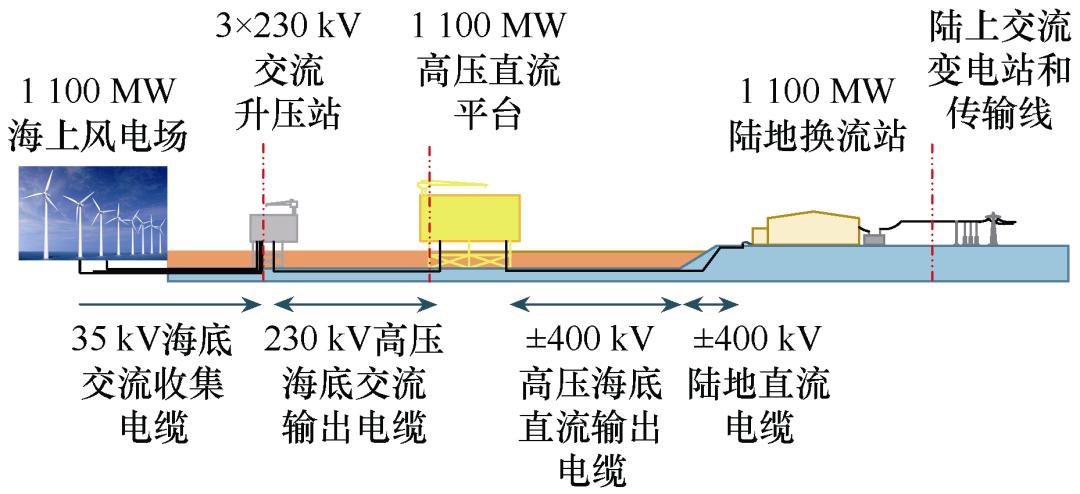
图1 江苏如东柔性直流输电工程示意图
江苏如东柔性直流输电工程采用南瑞继保电气有限公司的新一代直流控制保护平台UAPC(unified advanced platform for protection and control)3.0,以提升平台计算、通信能力和安全水平,降低系统控制延时,同时提高运维方便性,满足快速电力电子控制和新型功率器件技术发展需求。UAPC3.0具有以下特点:
1)采用高性能、低延时的多核并行计算方案,最快任务周期10 ms。
2)支持主机灵活扩展资源的高速分布式系统实时总线技术,总线速率达2.5 Gbit/s。
3)采用支持流水线式并行计算的高速输入/输出(input/output, I/O)采集、数据预处理和实时传输技术,延时低至7 ms。
4)采用单套主机通信接口、数据处理环节冗余,I/O端双模数(analog to digital, AD)采样、实时比对。
2 柔性直流输电控制系统
2.1 控制系统分层
根据完成功能与控制目标,柔性直流输电系统换流站的控制保护可以分为系统级控制、换流站级控制、换流阀和子模块级控制。柔性直流输电工程控制保护系统示意图如图2所示。根据功能分层,对应于控制保护系统的设备,可分为控制保护设备、阀控与子模块控制设备两大类,本文将控制保护设备的链路延时称为控制系统链路延时。
1)系统级控制确定柔性直流输电工程各个换流站的控制目标与相互配合关系,可分为有功功率类控制与无功功率类控制。有功功率类控制主要调节有功功率或与其相关的直流电压、交流系统频率等物理量,无功功率类控制主要调节无功功率或交流电压。
由于风速变化的随机性,海上换流站不能通过定有功功率控制方式来控制直流系统传输的有功功率,否则在风速变化时会引起频率波动,影响系统的稳定性,此时需要采用定频率控制,保证风电场并网端频率稳定。海上换流器应向无源网络提供稳定的交流电压,需要对无源侧的交流电压进行控制。同时,为了保证直流电压稳定而使各站换流站正常工作,在柔性直流输电系统中,应选取一站进行直流电压控制。因此,对于如东柔性直流输电工程,海上站控制方式为定交流电压控制与定频率控制,陆上站控制方式为定直流电压控制与定交流电压/无功功率控制。
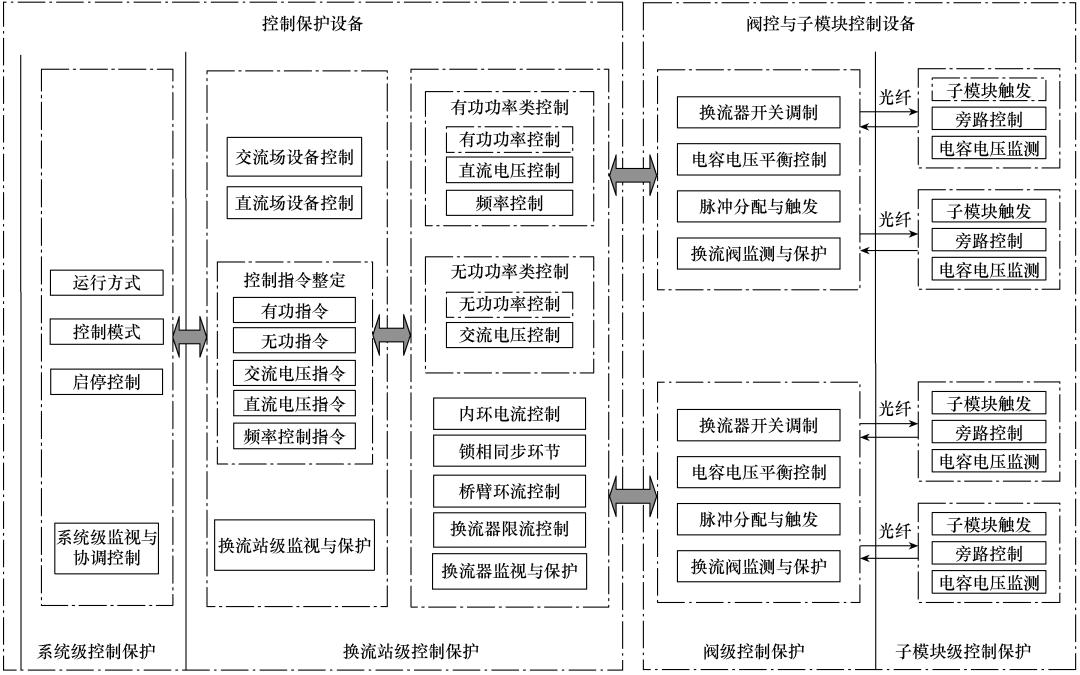
图2 柔性直流输电工程控制保护系统示意图
2)换流站级控制确定站内的控制策略,换流站级控制器原理如图3所示,在dq坐标系下建立电压源型换流器(voltage source converter, VSC)数学模型,根据有功功率、无功功率和直流电压等指令值,结合系统电压,生成交流电流的指令值,通过调节换流器输出的交流电压使交流电流跟踪其指令值。内环控制环节接收来自外环控制的有功、无功电流的参考值idref和iqref ,并快速跟踪参考电流,实现换流器交流侧电流波形和相位的直接控制。
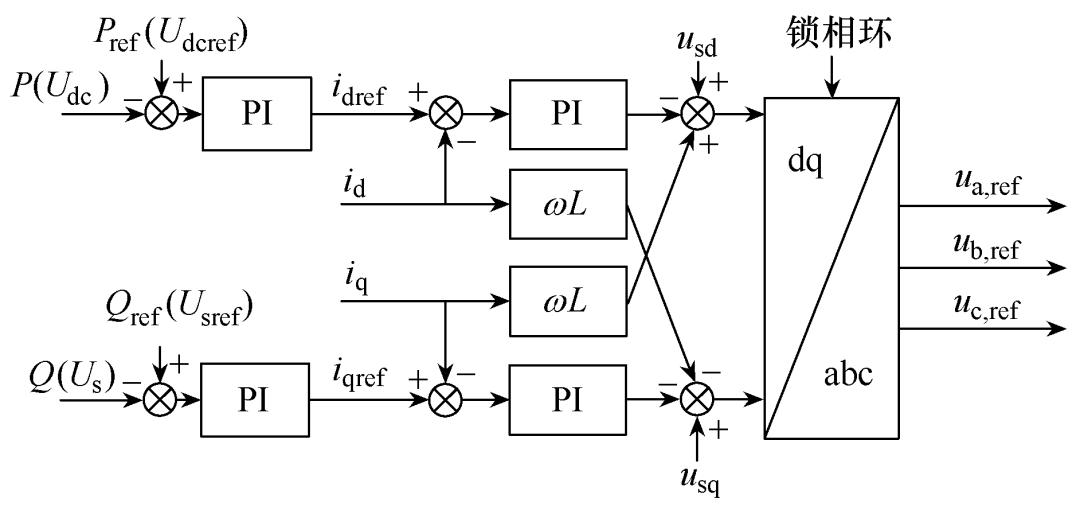
图3 换流站级控制器原理
3)换流阀和子模块级控制。换流阀级控制主要作用为接收控制主机参考波,叠加子模块电容均压及环流控制等,产生换流阀基本模块的投切触发。换流阀子模块级控制的任务是接收阀级控制产生的触发脉冲信号,根据触发脉冲信号,对子模块绝缘栅双极型晶体管(insulated gate bipolar transistor, IGBT)进行开通和关断控制。
2.2 控制系统各部分对系统振荡频带的影响
将柔性直流输电系统作为一个整体,以解耦形式研究柔性直流输电控制各个环节对系统振荡频带的影响。柔性直流输电控制各环节对系统频带的影响如图4所示,外环和锁相主要影响中低频带;内环与前馈滤波主要对中频段至高频段影响较大;延时和调制对高频段产生影响,过大的延时导致换流器在较低的高频段呈现负阻抗特性,使其对系统振荡阻尼减弱甚至放大振荡。因此,详细研究实际控制系统各环节的延时,可以作为制定不同频带振荡抑制策略的重要依据。

图4 柔性直流输电控制各环节对系统频带的影响
3 延时测试方法
分别对控制系统链路延时、阀控系统链路延时及控制系统全链路延时进行测试,下面分别说明。
3.1 控制系统链路延时测试
控制系统链路延时包含测量装置自身延时、测量装置至直流极控制保护(pole control and prote- ctions, PCP)主机的传输延时、PCP自身延时及PCP主机至柔性直流输电阀控系统的传输延时4部分。
其中,测量装置自身延时主要包含数据接收及转换环节、数据处理环节与数据输出环节3部分。数据接收及转换环节为交流采集板卡信号接收、转换系统同步电压电流,并发送给数字信号处理(digital signal processing, DSP)芯片;数据处理环节进行数据坐标转换等数据处理工作;数据输出环节将数据处理环节产生的数据转换为千兆光信号并发出。
PCP主机自身延时主要包含数据接收及转换环节、数据处理环节、控制环节与数据输出环节。数据接收及转换环节接收、转换测量装置发送的千兆光信号,获取系统实际模拟量信息;数据处理环节进行数据系数转换及坐标转换等数据处理工作;控制环节通过控制的闭环运算,生成参考波并从DSP芯片发出;数据输出环节将DSP芯片发出的参考波转换为光信号发出。
控制保护系统链路延时测试对上述4部分延时进行整体测量。装置输入的理想正弦电压经过测量装置采样、转换、输出,以及PCP主机接收、转换、坐标变换、生成参考波等环节,输出至柔性直流VBC系统。应注意的是,该电压在PCP中仅经过数据接收、计算与输出这一完整流程,其相位未改变。测量装置输入的正弦电压与阀控装置接收的参考波之间的相位差等效延时时间,即为控制保护系统链路延时。
由于PCP主机装置发送给阀控装置的参考波采用60044-8光信号,无法直接录波,故增加一台独立的测试装置,该装置能接收并将PCP输出的60044-8光信号转换为与其相位一致的方波电平信号(光电转换时延约25 ns,可忽略不计),并输出至示波器。通过计算方波信号与输入测量装置正弦电压的过零点的时间差,即可计算出控制系统链路延时。控制系统链路延时测试方法如图5所示。
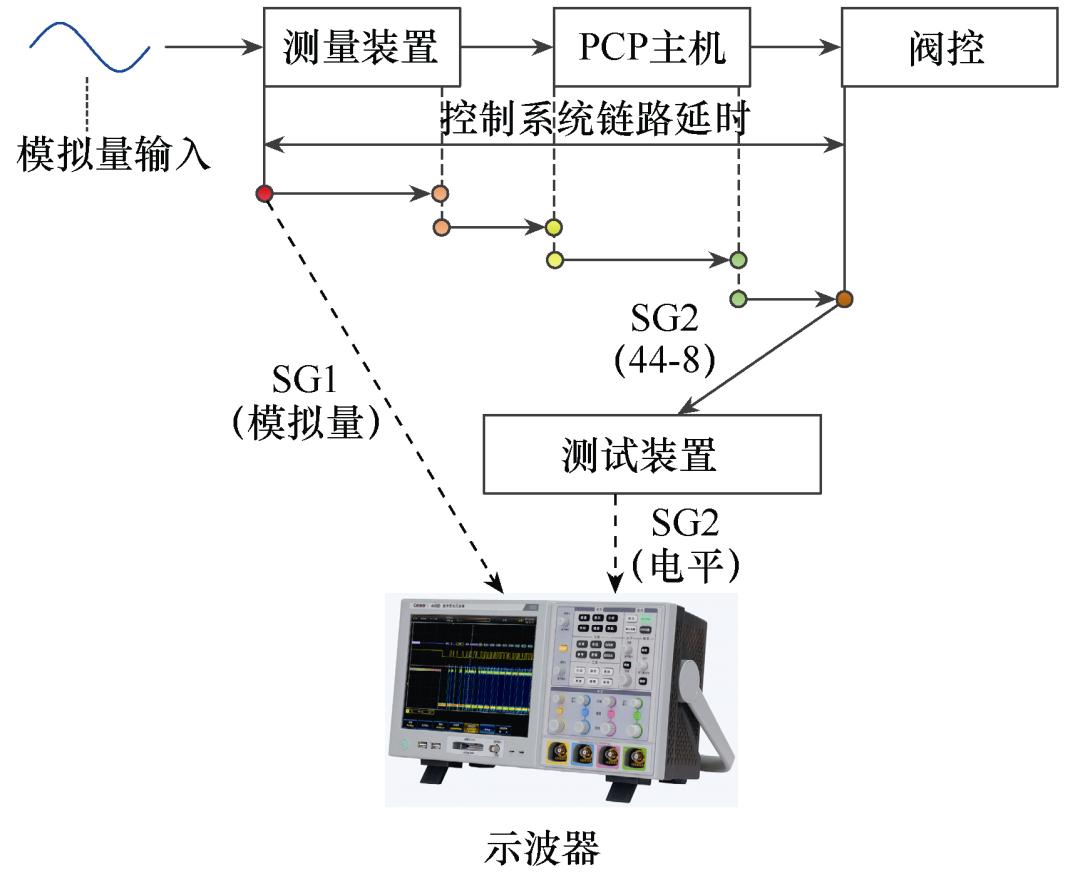
图5 控制系统链路延时测试方法
3.2 阀控系统链路延时测试
阀控系统链路延时测试可采用以下两种方法。
1)方法1。在PCP主机中设置固定的桥臂参考波,由于如东柔性直流输电工程的直流额定电压为800 kV,因此将参考波设置为幅值为0与800码值的方波。当阀控装置收到幅值为0的方波时,所有子模块退出;当阀控装置收到幅值为800的方波时,所有子模块投入。PCP将方波以60044-8光信号的形式发出,连接至一台独立的测试装置,转换为与其相位一致的方波电平信号。比较独立测试装置输出的电平信号与子模块投入的命令信号之间的时间差,即可得到链路延时。阀控系统链路延时测试方法1如图6所示。
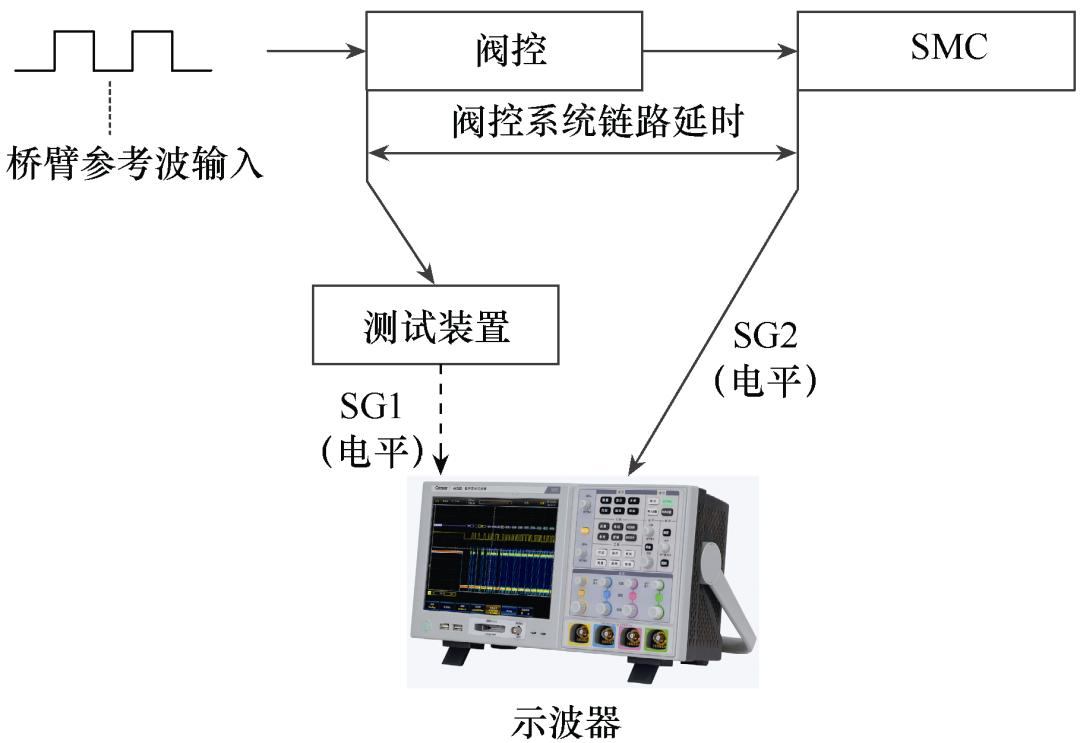
图6 阀控系统链路延时测试方法1
2)方法2。PCP发出换流器解锁命令,阀控接收解锁信号并通过电平信号输出,同时阀控将脉冲分配屏发至子模块的解锁信号通过电平信号输出,检测两个解锁信号的时间差值即可得到阀控系统链路延时。
3.3 全链路延时测试
控制保护系统全链路延时由控制系统延时测试与阀控系统延时测试综合得到,控制系统全链路延时测试方法如图7所示。首先,与控制系统链路延时测试相同,信号源为测量装置输入的理想正弦电压,PCP主机收到该电压后,根据其过零点产生一个固定的桥臂参考波,该参考波为0与800码值的方波。阀控装置收到方波后,子模块整体投入或退出。比较测量装置输入的正弦电压的过零点(负到正或正到负)和子模块控制(submodule controller, SMC)发出子模块IGBT导通或关断信号之间的相位差,该相位差等效延时时间即为控制保护系统全链路延时。

图7 控制系统全链路延时测试方法
4 延时测试结果
4.1 控制系统链路延时
控制系统链路延时测试结果如图8所示。测量装置实时采样交流电压,示波器的通道2(粉色)对应测量装置输入信号,通道1(蓝色)为PCP输出60044-8光信号转换后的方波,横轴为时间(20 ms/格)。由示波器波形可以看出,延时为80~90 ms,此结果与硬件平台延时理论值(87.2 ms)基本一致。

图8 控制系统链路延时测试结果
4.2 阀控系统链路延时
1)采用方法1测试陆上站阀控系统链路延时,测试结果如图9所示,示波器的通道1(蓝色)对应桥臂参考波,通道2(红色)为子模块投入命令信号,延时为38 ms。

图9 陆上站阀控系统链路延时测试结果(方法1)
2)采用方法2测试海上站阀控系统链路延时,测试结果如图10所示,示波器的通道1(蓝色)对应阀控接收的解锁信号,通道2(红色)为子模块解锁信号,延时为40 ms。两站阀控延时与文献测试结果一致。

图10 海上站阀控系统链路延时测试结果(方法2)
4.3 控制系统全链路延时
1)陆上站全链路延时测试结果如图11所示,示波器的通道1(蓝色)对应测量装置输入信号,通道2(红色)为子模块投入命令信号,全链路延时为134 ms。
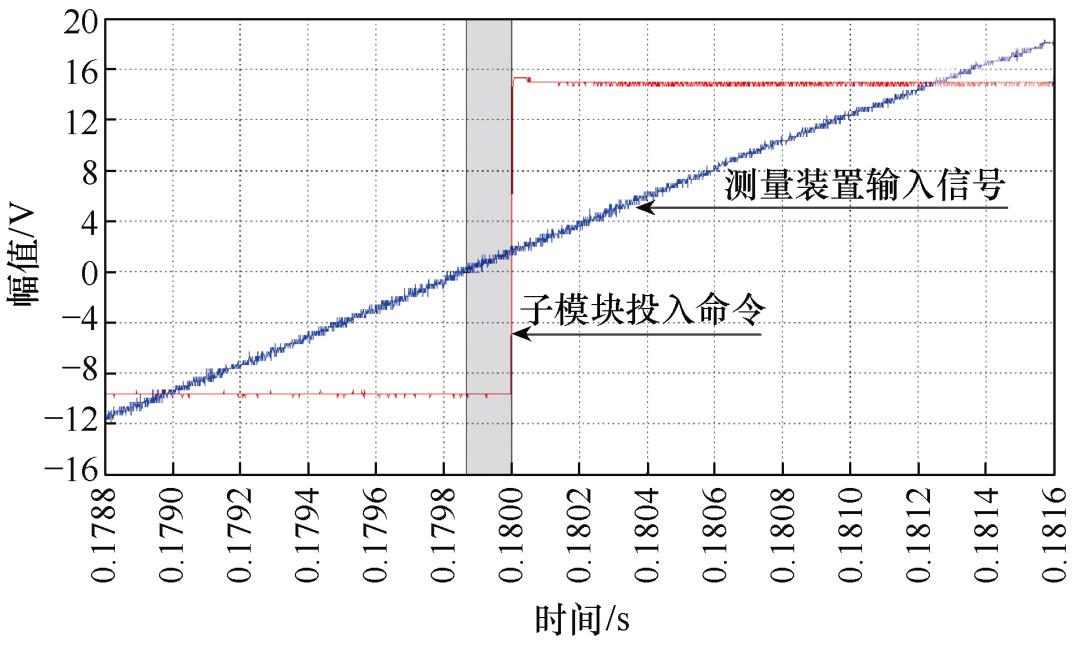
图11 陆上站全链路延时测试结果
2)海上站全链路延时测试结果如图12所示,示波器的通道2(红色)对应测量装置输入信号,通道1(蓝色)为子模块退出命令信号,全链路延时为135 ms。
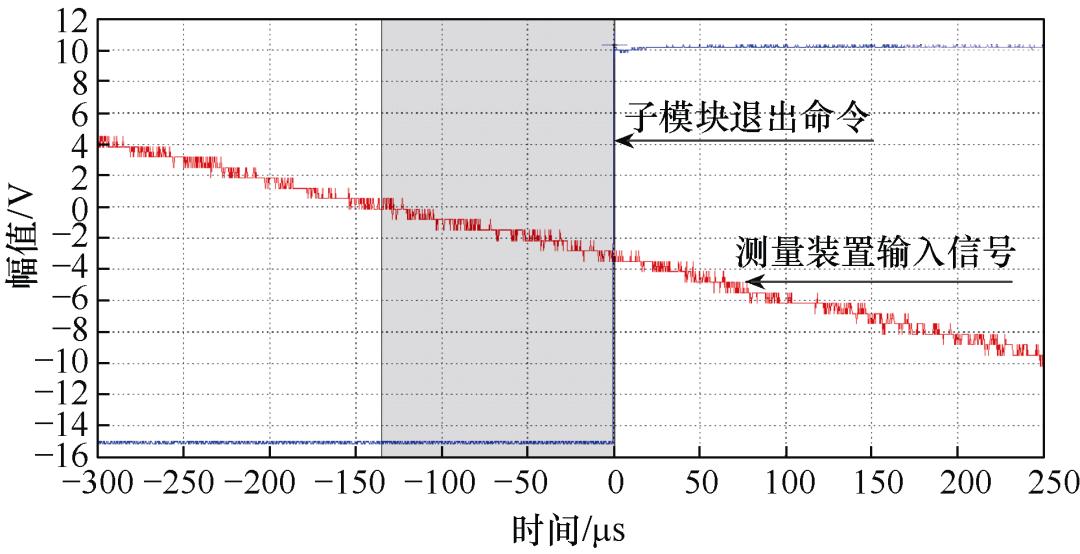
图12 海上站全链路延时测试结果
5 结论
本文提出了柔性直流输电控制系统链路延时测试方法,并依托江苏如东柔性直流输电工程进行测试,得到如下结论:
1)所提测试方法有效,测试结果与硬件平台设计理论值基本一致。该方法可推广应用至统一潮流控制器、特高压直流输电等其他工程。
2)江苏如东柔性直流输电工程采用新一代直流控制保护平台,控制系统链路延时降低至80~90 ms(上一代产品全链路延时135~155 ms),有利于改善换流器阻抗特性,降低系统振荡风险。
3)控制系统全链路延时仍有降低空间。提高测量装置采样率并采用性能更强的采样芯片,预计可使控制链路延时降低10 ms左右。控制系统与阀控系统采用千兆光纤通信,也可缩短通信延时。此外,PCP主机、阀控链路与子模块控制等环节的延时,可通过优化软件逻辑顺序、加快装置间通信速率等方式进行优化。
本工作成果发表在2025年第12期《电气技术》,论文标题为“ 柔性直流输电控制系统链路延时测试方法”,本项目得到国家电网公司科技项目的支持