15亿公里外的土卫六上有1台灵巧的机械臂正在采矿,而你在地球上带着触觉反馈手套远程操作矿机,并且能清晰的感觉到那块岩石的硬度,这不是科幻小说,人类已经发明出了类似触觉遥控机器人,在未来太空采矿真的可能会实现。不但能远程操作机械手臂工作,还能感觉到机械手臂触碰的真实触感。
图1是前世界首富杰夫·贝索斯正在体验1台触觉遥控机器人,他的双手戴着指尖传感系统手套,前面的机械手臂跟随他的动作在操作,这乍一看没有啥,因为机械臂的发明可以追溯到1954年,70年来并没有本质上的变化。但是这款机器人却运用了远程触觉技术,机械臂可以把真实的触摸反馈到控制者的手指上。这样的好处不言而喻,比如在排雷时就能远程控制机械臂感觉到爆炸物的手感、温度和线路的松紧度。

只要你戴上触觉反馈手套,就能远程控制几百公里外的机器人,感受来自机械手臂的细微触感,而不是以前只能凭实时摄像来无触感的操作机器人。这个系统在处理危险情况时可以派上用场,例如处理受污染的材料或在偏远、难以到达的地方工作。被核辐射污染的物体存在致命的放射性,或被剧毒物污染的实验器材容易让人殒命,机器人入场可以代替人类,但是一些仪器或储罐很脆弱,直接用机器人手臂触碰可能会碰碎,如果戴上触觉反馈手套就能感受这个器皿的温度和材质,就能用恰当的力抱起来防止碎裂。
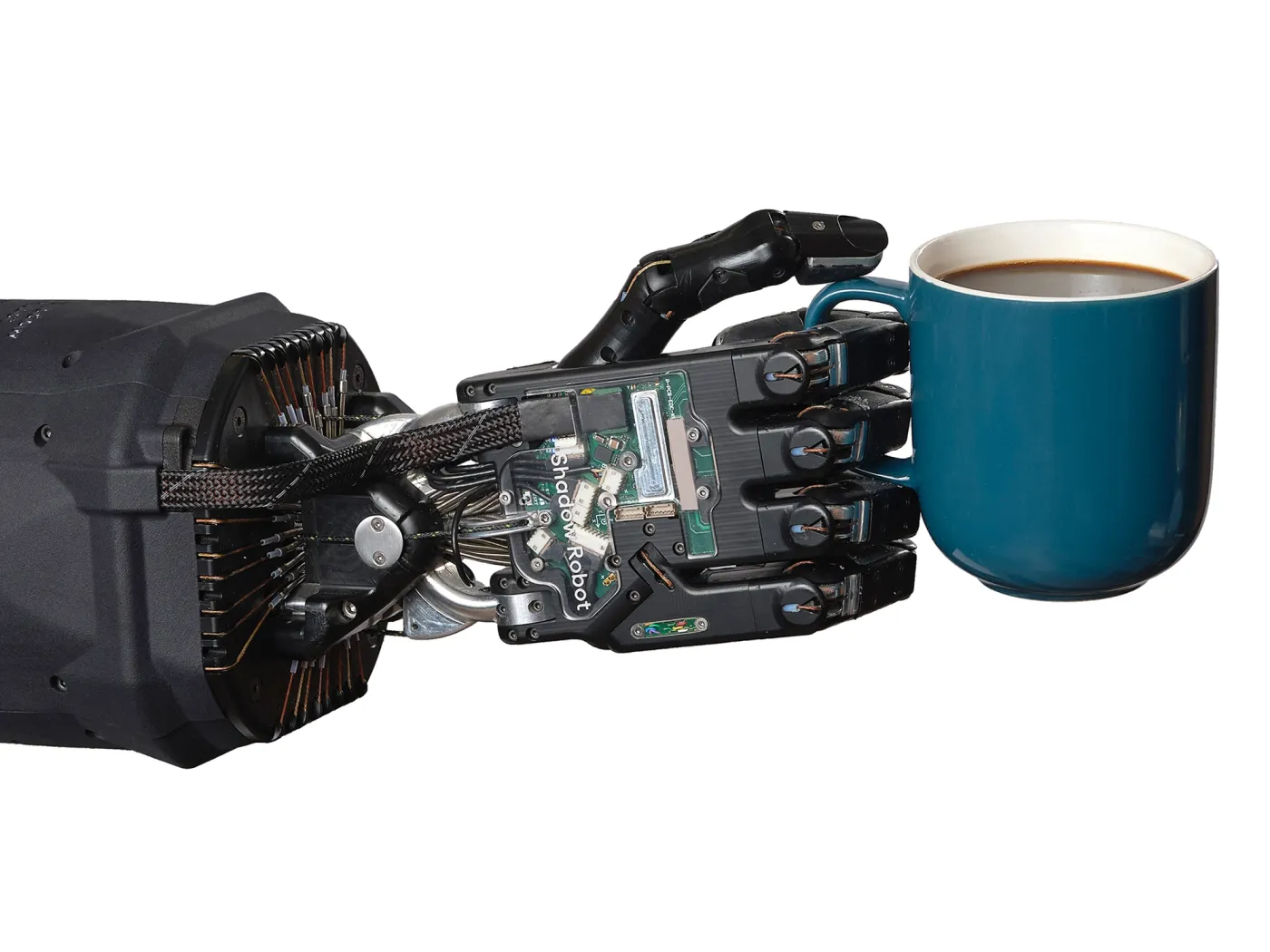
触觉远程机器人的的机械手指上有10个灵敏传感器,让机器人会感知物体,通过传感器把对物体的感知传递到操作者的触觉反馈手套里,就能体验机器人的触感,比如机械手臂抓住一个香蕉就有柔软外皮的触感,触摸一个魔方就有冰凉的塑料质感。当机械臂握住一个玉米面窝头时,你就能感觉到玉米碴子的粗糙感,而不是白面馒头的那种细腻。
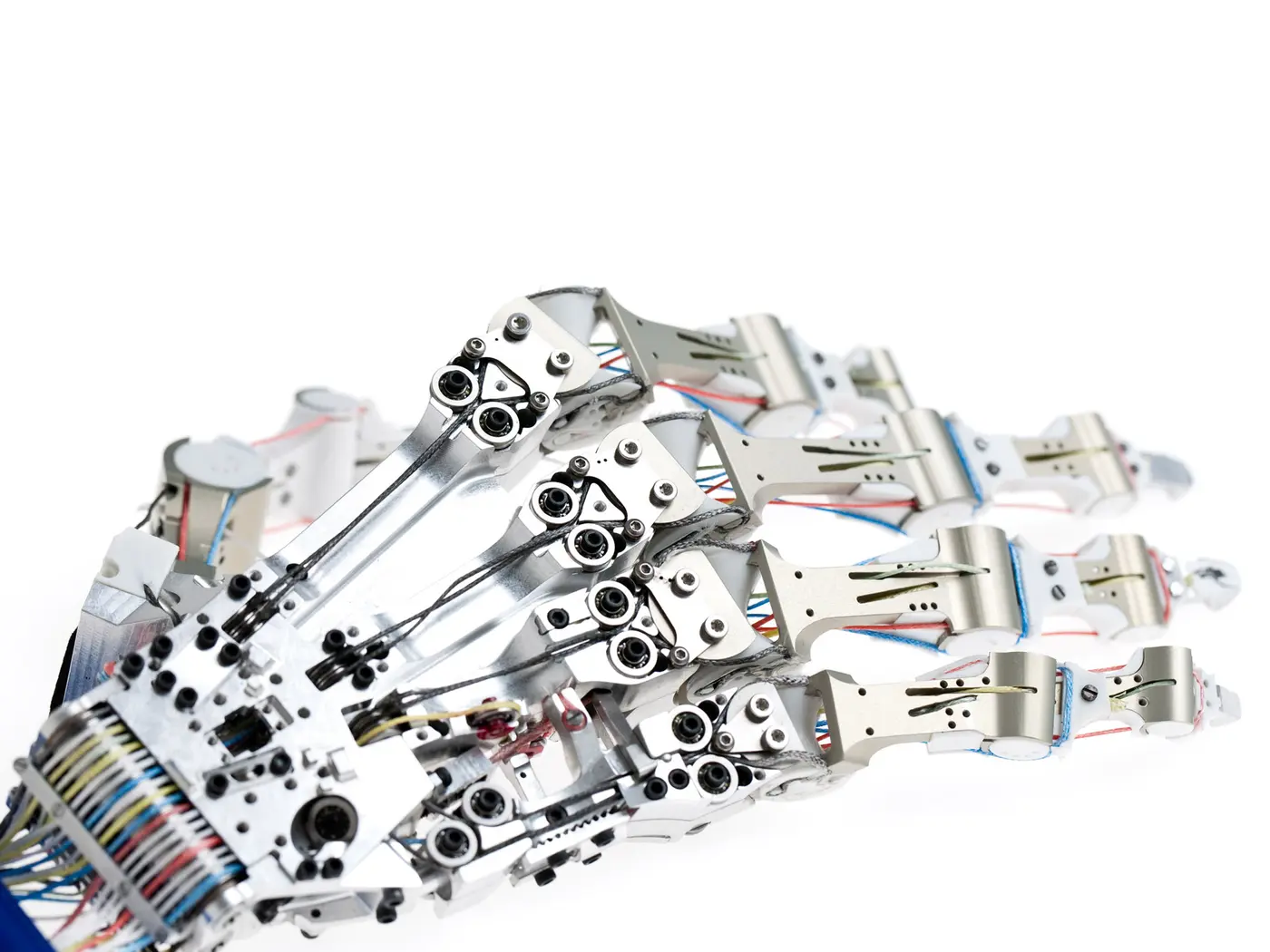
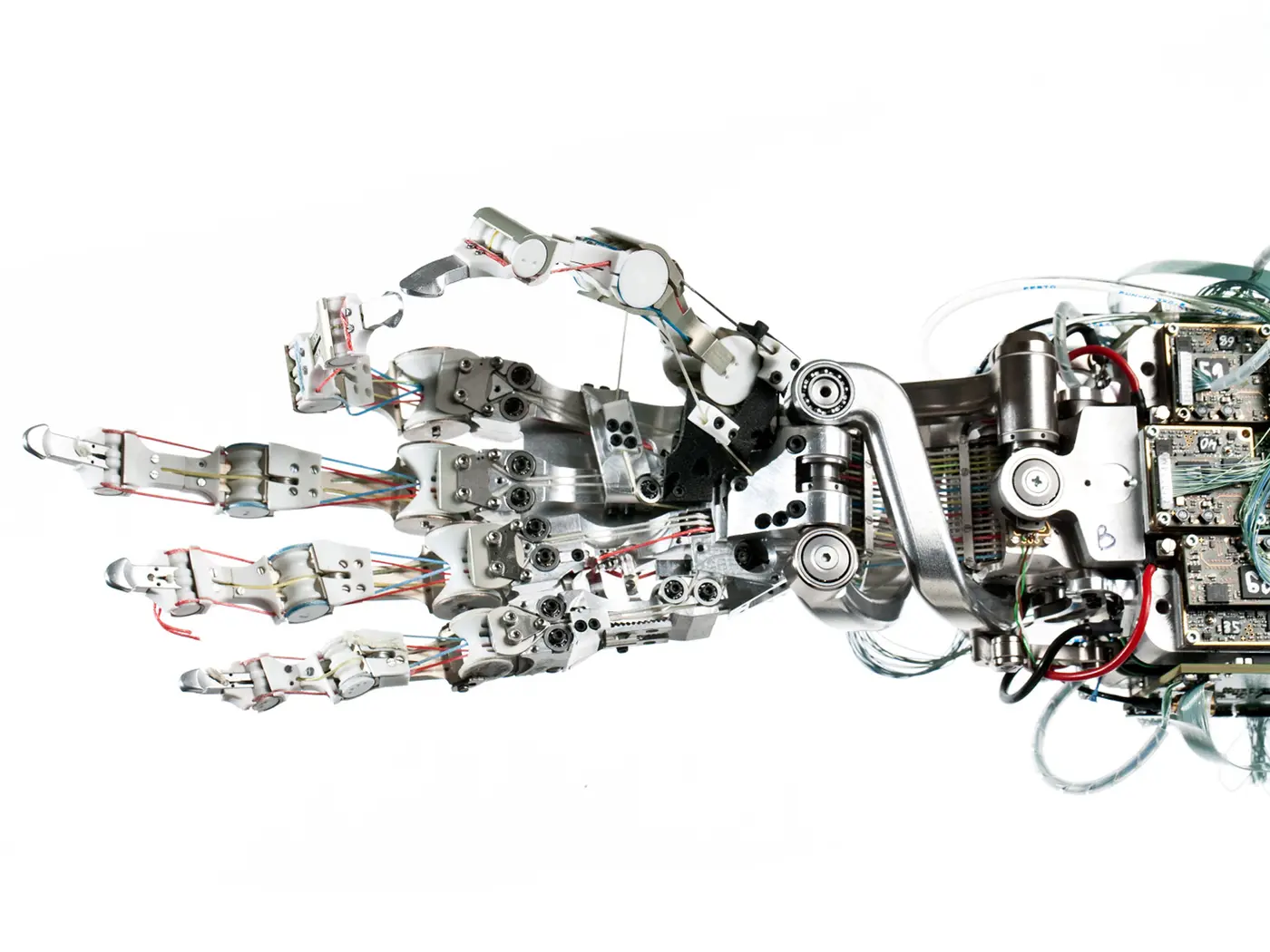
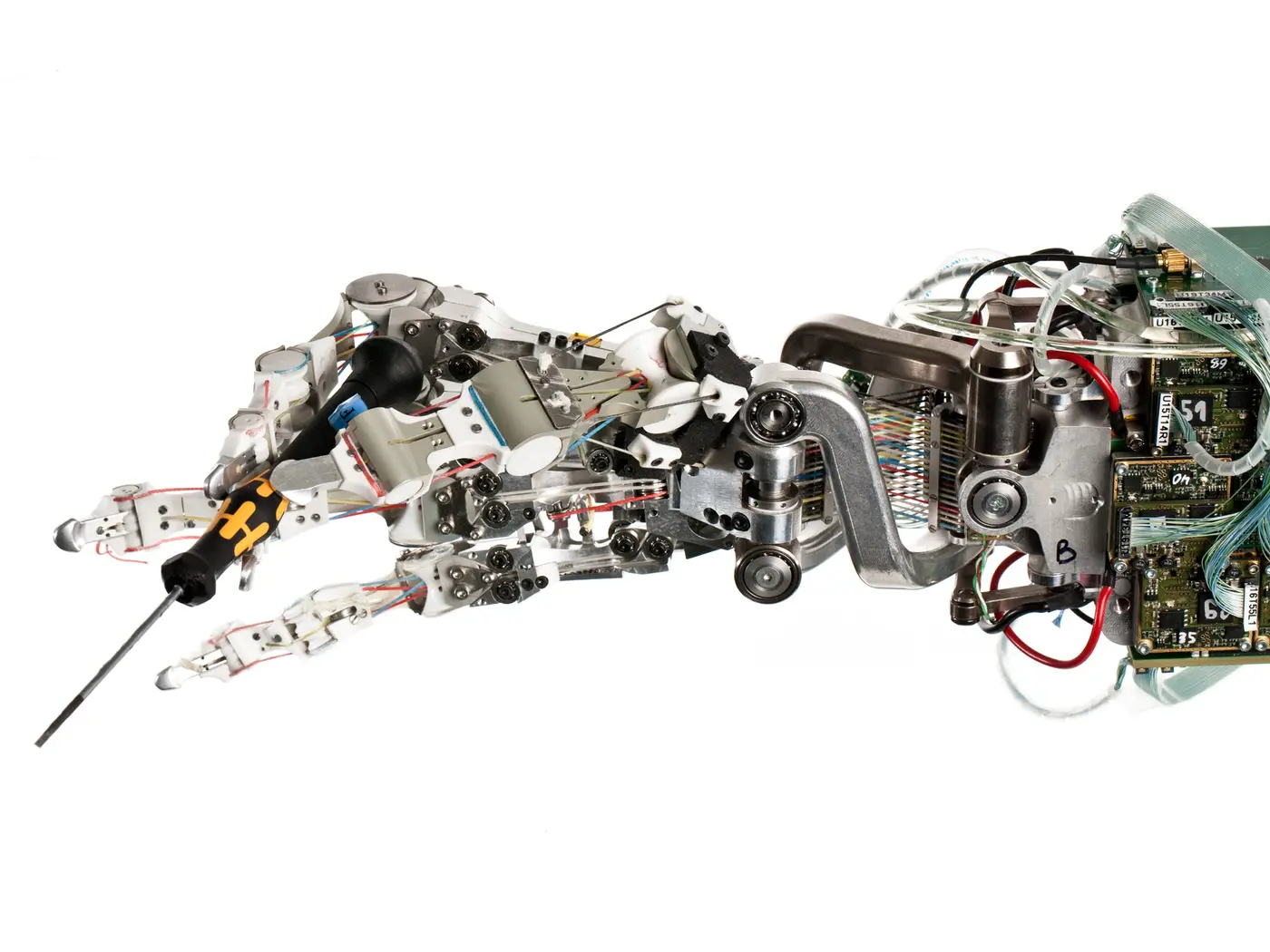
机械手臂很复杂包括5根手指、235台传感器和1个微型外接摄像机。手臂有 24 个关节,其中20个直接驱动,还有4个不被直接驱动的关节。为了能模拟人手的灵巧,配备了气动肌腱,大拇指有3个自由度,另外4根有4个自由度,再加上手腕上2个自由度,整个手臂就有24个自由度。正因为如此灵巧,可以轻松拿起鸡蛋、灯泡和玻璃杯等易碎物品。
触觉远程机器人的关键之一就是指尖传感系统,原理是机械臂的10根手指上都有24个电极,电极上有一层硅胶材料,内部有生理盐水,根据机械臂的受力情况,在硅胶层和电极之间形成盐水流动,用于对机械指尖施加压力,电极就能检测到盐水中电阻的变化,传递给操作者的触觉反馈手套感知机械臂的触觉。

传感系统可以检测指尖的压力、温度、湿度、振动等多种物理量,并将其转换为电信号。电信号通过无线传输设备发送到信号接收端的信号处理器。处理器就会接收传感器输出的电信号,并进行处理和分析,把信号进行滤波、放大、数字化等操作,提取出有用的信息,如指尖的位置、运动轨迹、触摸力度等然后传送被输出设备。
输出设备是指尖传感系统终端,能把处理后的信号转换为人类可感知的信息,比如显示屏、音响、振动器和温度感应器等,机械臂的轻轻的触动会引发传感器的局部膨胀,这样就能让你的指尖皮肤有同样的体感。当机械手臂触碰一颗手雷,就把手雷表层的信号输送到你的传感系统,就能刺激你的手部皮肤并把压力传递给骨骼,让你感觉这不是黄皮土豆,而是一枚M57式杀伤手雷。