英文题目:Reactive motion planning framework based on control barrier function and sampling-based MPC for humanoid upper-body robots
中文题目:基于控制屏障函数与采样式MPC的仿人上半身机器人反应式运动规划框架
作者:Zhaoyang Chen, Xinyang Fan, Fenglei Ni, Yi Ren, Hong Liu
作者单位:哈尔滨工业大学机器人技术与系统全国重点实验室;华为技术有限公司先进制造实验室
期刊:Science China Technological Sciences
发表时间:2025年10月21日
引文格式:Chen Z. Y., Fan X. Y., Ni F. L., Ren Y., and Liu H., “Reactive motion planning framework based on control barrier function and sampling-based MPC for humanoid upper-body robots,” Science China Technological Sciences, vol. 68, no. 11, 2120301, 2025.
01 全文速览
仿人上半身机器人在真实人类环境中执行任务时,不能只会“按轨迹走”。它需要在端托盘、搬物体、双臂协同操作时,实时绕开突然出现的障碍,还要在手臂够不到目标时主动使用腰部扩展工作空间。
这篇论文面向这一问题,提出了一个统一的反应式运动规划框架。其核心不是单一避障算法,而是把 双臂紧耦合协调、CBF安全避障、MPPI局部重规划、腰臂协同扩展工作空间 放在同一个框架中。对于仿人机器人控制而言,这篇文章的亮点在于:它关注的不是“单机械臂如何避障”,而是“仿人上半身机器人如何在任务约束下安全、灵活、连续地动作”。

图1:仿人机器人端托盘绕过凹形障碍并在必要时触发腰部运动的任务示意图。
✅ 亮点1:实现紧耦合双臂协同下的反应式无碰撞运动。
✅ 亮点2:提出CBF安全滤波器,对参考轨迹进行实时局部重塑。
✅ 亮点3:利用MPPI优化力导航核,使双臂逃离凹形障碍引起的局部极小。
✅ 亮点4:基于双臂可达性与可操作度触发腰部运动,实现腰臂协调扩展工作空间。
02 研究内容
🎯 2.1 问题切入:仿人双臂操作难在哪里?
双臂紧耦合操作与普通双臂运动不同。例如机器人双手端着托盘时,两只手之间的相对位姿必须保持稳定,否则托盘会倾斜、杯子会滑落。与此同时,双臂整体还要朝目标移动,并绕开环境中的障碍物。
更难的是凹形障碍。传统反应式避障通常依赖局部环境信息,面对凸障碍还能绕开,但遇到凹形障碍时容易陷入局部极小:机器人看似一直在避障,却无法继续朝目标前进。

图2:凸障碍与凹障碍下反应式运动规划的差异。
🧩 2.2 总体框架:五个模块协同工作
论文提出的框架由五个核心模块组成:
M1 是双臂CDTS模块,用合作双任务空间描述两只末端执行器之间的相对位姿和整体绝对位姿;M2 是向量场VF模块,用目标吸引力和可操作度力在线生成名义参考轨迹;M3 是CBF安全滤波模块,用QP实时修正轨迹避免碰撞;M4 是局部VF调制模块,通过力导航核和MPPI帮助机器人逃离局部极小;M5 是反应式腰部运动模块,根据双臂可达性和托盘倾角决定是否启用腰部。

图3:完整算法框架图。
⚙️ 2.3 CDTS:让双臂“既像一个整体,又保持灵活”
合作双任务空间 CDTS 用两个变量描述双臂系统:

其中 (x_r) 表示两末端之间的相对位姿,(x_a) 表示双臂协作系统的绝对位姿。论文将“保持相对位姿”作为最高优先级任务,将绝对位置控制、末端倾角控制、关节限位规避作为次级任务,通过多任务优先级控制实现协同。
这部分很关键:机器人不是简单让两个手分别运动,而是把“双手+托盘”看作一个协作系统。相对位姿稳定保证任务不失败,绝对位姿和倾角控制保证运动灵活且安全。
🛡️ 2.4 CBF安全滤波:把“可能碰撞的轨迹”实时修正
向量场VF先生成名义参考加速度:

其中 (F_g) 是目标吸引力,(F_m) 是远离低可操作度区域的力。随后,CBF安全滤波器通过QP将名义加速度修正为安全加速度:

约束条件包括系统动力学、加速度限幅和CBF安全约束。障碍物与双臂控制点用球体包络,屏障函数为:

直观理解就是:如果原轨迹安全,滤波器几乎不改变它;如果可能碰撞,滤波器会以最小修改量实时重塑轨迹。
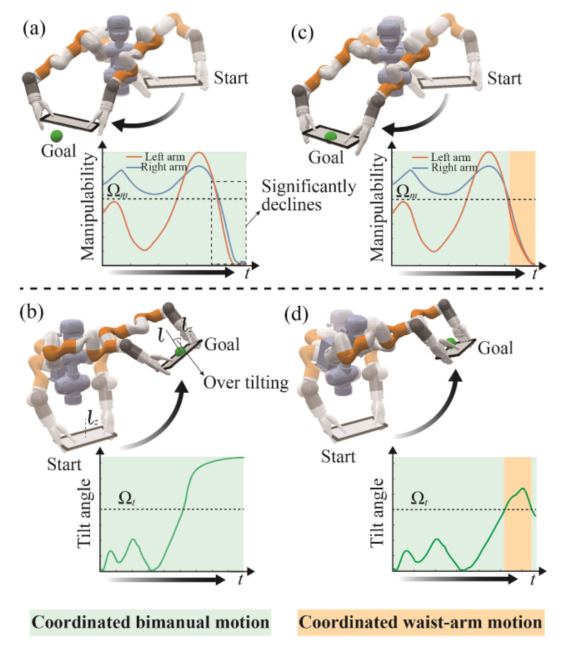
图4:CBF区域、动态障碍物、安全参考轨迹与名义轨迹对比。
🧠 2.5 MPPI+力导航核:从凹形障碍中“主动绕出来”
CBF能保证安全,但不能保证一定不会陷入局部极小。为解决凹形障碍问题,论文提出局部VF调制策略。其核心是设计 Force Navigation Kernel,力导航核,改变名义向量场合力方向:

其中 (phi,psi) 决定力导航核方向,由MPPI进行采样优化。MPPI生成一批候选轨迹,根据接近目标、满足运动约束、有效探索、避免障碍等代价函数选择更优调制方向。
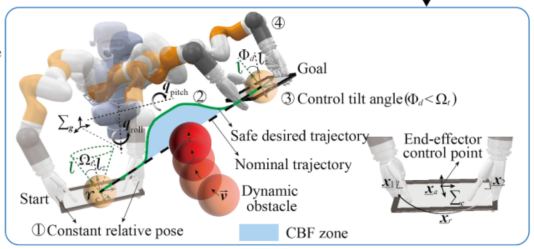
图5:凹形障碍下,局部VF调制如何把名义轨迹从“卡住区域”引导到可绕行区域。
🤖 2.6 反应式腰部运动:不是一直用腰,而是需要时才用
论文没有让腰部始终参与运动,而是设计了触发机制:当双臂可操作度低于阈值,或托盘倾角超过阈值时,腰部运动被激活。腰部速度方向由双臂可达性评分决定。
这种设计很像人类行为:手够得着时只用手,手够不到或姿态不舒服时才自然转腰、侧身或前倾。

图6:双臂工作空间内的可达性评分。
03 创新点
🔍 3.1 将双臂紧耦合、避障和腰部协调统一起来
本文不是分别解决双臂控制、避障和腰部运动,而是把三者纳入同一反应式框架,更贴近仿人机器人真实操作需求。
🛡️ 3.2 用CBF为双臂协同任务提供控制理论安全保障
CBF-QP安全滤波器能够在线修正参考轨迹,使机器人在动态障碍出现时仍能继续执行任务。
🧭 3.3 用MPPI解决反应式规划的局部极小问题
局部VF调制只在陷入局部极小时激活,兼顾计算效率与逃逸能力。
⚙️ 3.4 腰部运动触发基于双臂可达性分析
腰部不再是预设轨迹或始终参与,而是根据任务执行状态反应式介入。
04 总结与展望
这篇论文的价值在于,它把仿人上半身机器人的运动规划从“单臂避障”推进到“任务约束下的全上身反应式协同”。双手要稳住托盘,轨迹要避开障碍,遇到凹形障碍要能绕出来,手臂够不到时腰部还要自然介入。这些问题叠加在一起,正是未来仿人机器人进入家庭、服务、医疗和工业现场时必须面对的真实挑战。
🔭 未来研究将聚焦于以下几个方向:
1. 从球体障碍扩展到点云、复杂几何和人体动态障碍;
2. 将CBF安全滤波与力控、接触操作和柔顺控制结合;
3. 提升MPPI局部调制在更复杂多障碍场景中的效率;
4. 进一步融合全身平衡控制,使框架适用于带腿仿人机器人;
5. 在真实任务中验证端到端感知误差、控制误差和安全裕度的综合影响。
声明:本文仅供学术交流,版权归原作者所有。如有错误或侵权,请联系更正或删除,欢迎留言探讨。