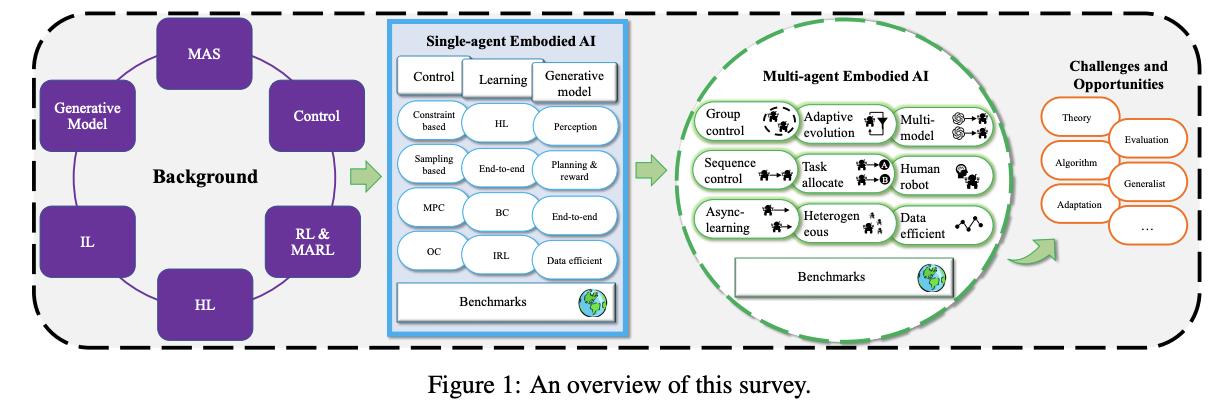
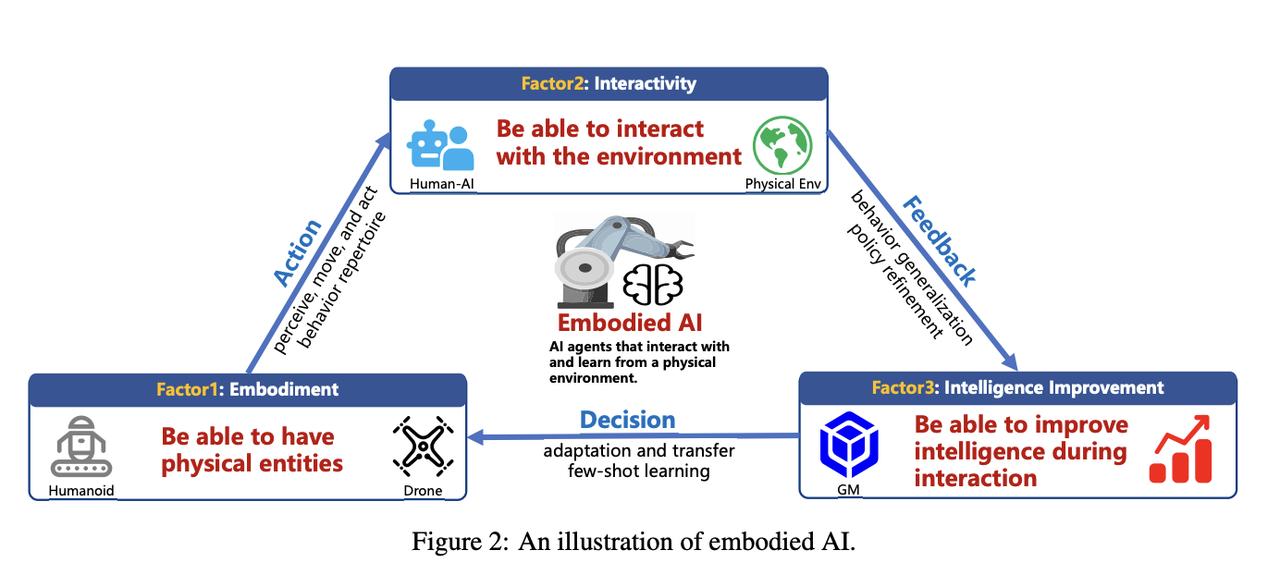
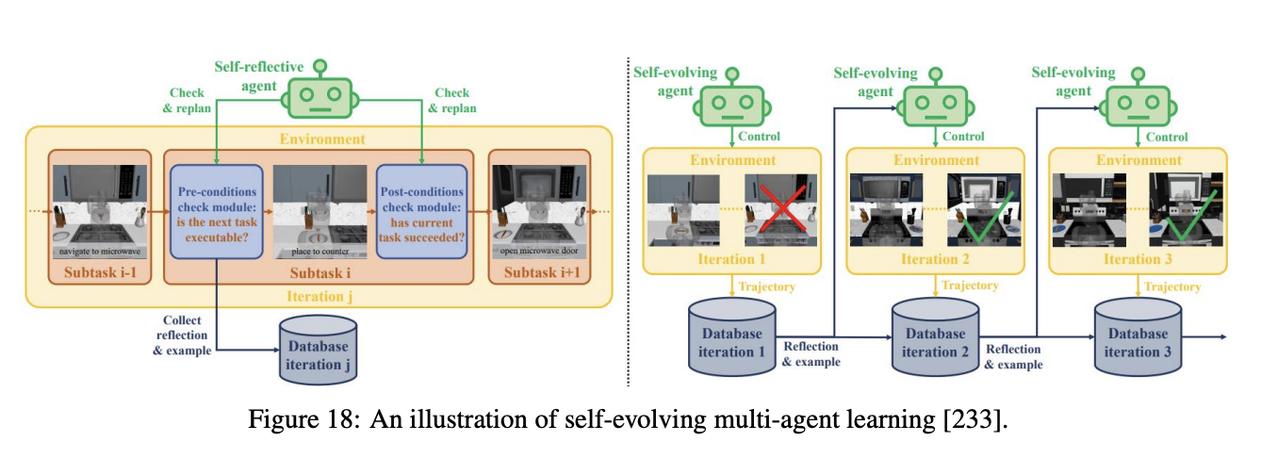
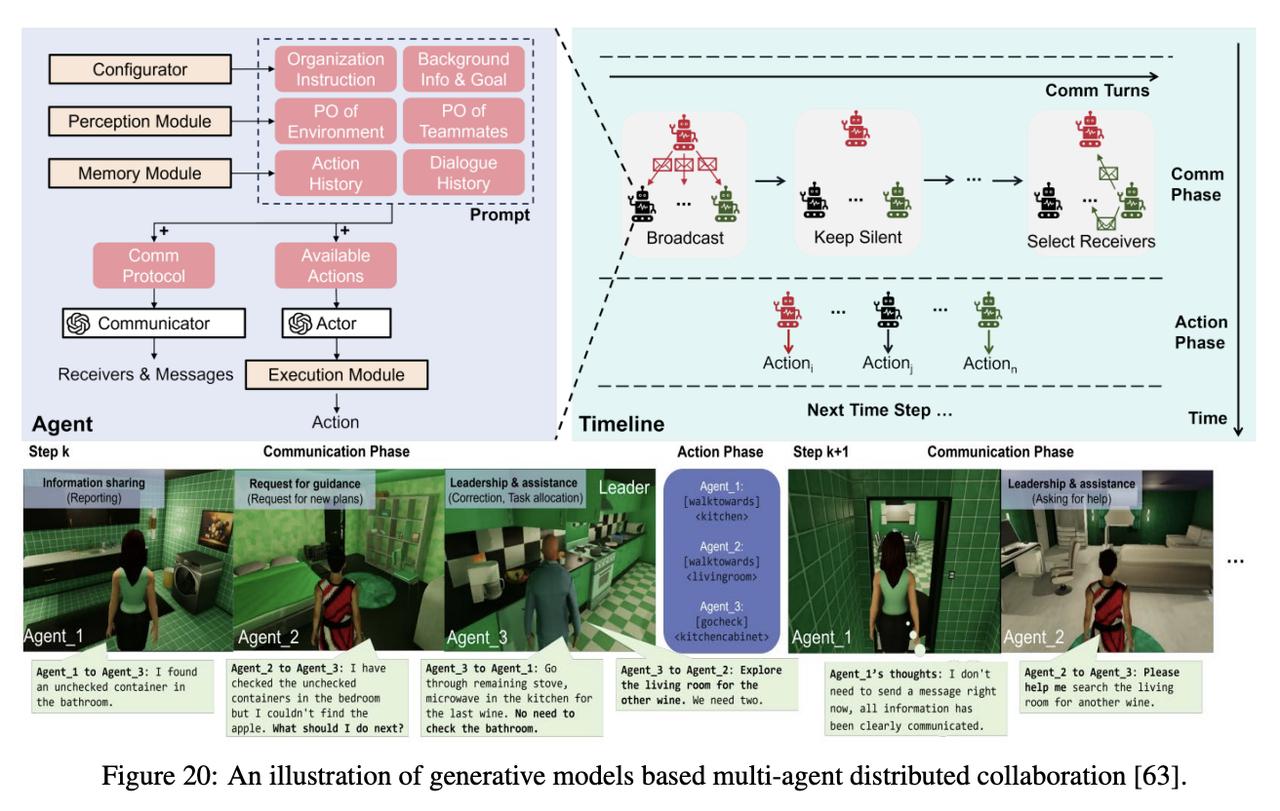
在复杂的现实环境中,往往需要机器人间的协作才能更好的达成任务。 目前大多数对于具身智能的研究,还集中在“单打独斗”的单智能体上,缺乏了对多智能体的研究。 来自北京理工大学的这篇综述,就总结了许多前沿的多智能体具身智能技术,从控制、学习到交互,一文get最新进展!【图1】 接下来,我们一起来简单观看一些精彩的总结:【图2】 - 具身智能的核心要素【图3】 拥有物理身体(具身性)、与环境互动(交互性)、通过经验提升智能(适应性) - 多智能体控制与规划 在多智能体系统(MAS)里,基于控制的方法仍然是实现高精度、实时决策的关键。最新的EMAPF框架采用动态聚类,把智能体分组管理: 组内 → 集中控制(高效精准) 组间 → 分布式协调(避免冲突) - 开放环境中的自进化机制【图4】 与封闭环境不同,开放环境是动态变化的、充满不确定性的。在这种复杂环境下,传统的多智能体强化学习方法(MARL)已经不够用了。最近的一些方法充分利用了生成模型的强大泛化能力: - 动态团队规模适应:用图神经网络和Transformer这些灵活的结构来处理团队人数变化的问题,配合分布式策略网络,让智能体可以轻松应对队友数量的增减; - 持续进化机制:通过自我博弈(self-play)及策略自省等机制,多智能体系统能在动态开放环境中持续提升协作性能。 - 多智能体任务分配【图5】 在多智能体具身智能中,生成模型可以通过强大的推理能力来分解任务并分配给不同的智能体,从而减少每个智能体的探索空间。 如SMART-LLM这类任务分解-分配范式,用预训练语言模型把大任务拆成多个可以同时进行的小任务,再根据智能体能力进行分组分配。 在此基础上,最新研究趋势呈三种技术路线: 1. 让生成模型既管分配又管执行,根据实际执行情况动态调整分配方案,形成完整闭环; 2. 针对现有方法经常忽略子任务先后顺序的问题,加入子任务依赖图来优化分配逻辑; 3. 用集中式的生成模型做全局决策,让各个智能体模仿中心模型的行为,实现隐式任务分配。 - 分布式决策 生成模型不仅可以用于任务分配,还可以用于分布式决策。典型实现包括: 1. 独立模型协作:为每个智能体配备独立的预训练生成模型,通过模型间通信补全观测信息或请求协助,实现去中心化协作 2. 混合评估机制:引入中心化生成模型评估分布式模型的决策质量,或通过全局LLM反射器量化个体贡献,优化信用分配 了解更综述内容,可以点击链接: