论文信息
英文题目:Physics-Informed Neural Mapping and Motion Planning in Unknown Environments
中文题目:面向未知环境的物理信息神经映射与运动规划
作者:Yuchen Liu, Ruiqi Ni, Ahmed H. Qureshi
作者单位:Department of Computer Science, Purdue University, West Lafayette, IN, USA
期刊:IEEE Transactions on Robotics
发表时间:2025年3月27日
引文格式:Liu Y., Ni R., and Qureshi A. H., “Physics-Informed Neural Mapping and Motion Planning in Unknown Environments,” IEEE Transactions on Robotics, vol. 41, pp. 2200–2210, 2025.
01 全文速览
机器人在未知环境中工作时,通常要先建图,再调用运动规划器找路。问题在于:地图本身并不直接等于路径,传统SDF、占据栅格、点云地图往往还需要RRT、PRM、轨迹优化等额外规划工具。本文的核心想法很直接,也很大胆:能不能让地图本身就携带“到达时间”和“导航方向”,从而把建图与规划真正融合起来?
作者提出了 Active Neural Time Fields,简称 Active NTFields。它不是只学习障碍物在哪里,而是在线学习环境中的 arrival time fields,到达时间场。这个场来自Eikonal方程,其梯度可以直接引导机器人从起点走向目标点。
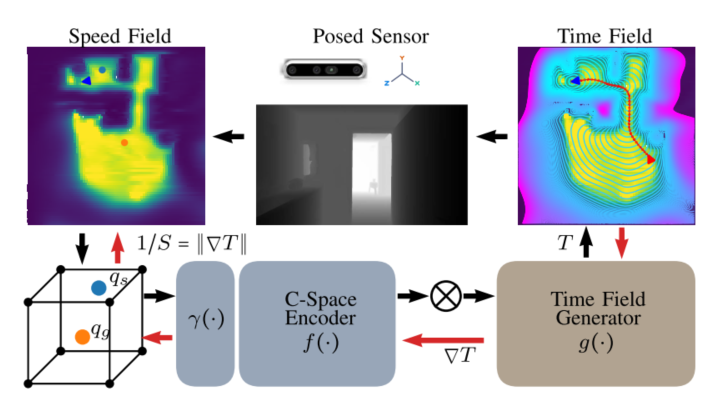
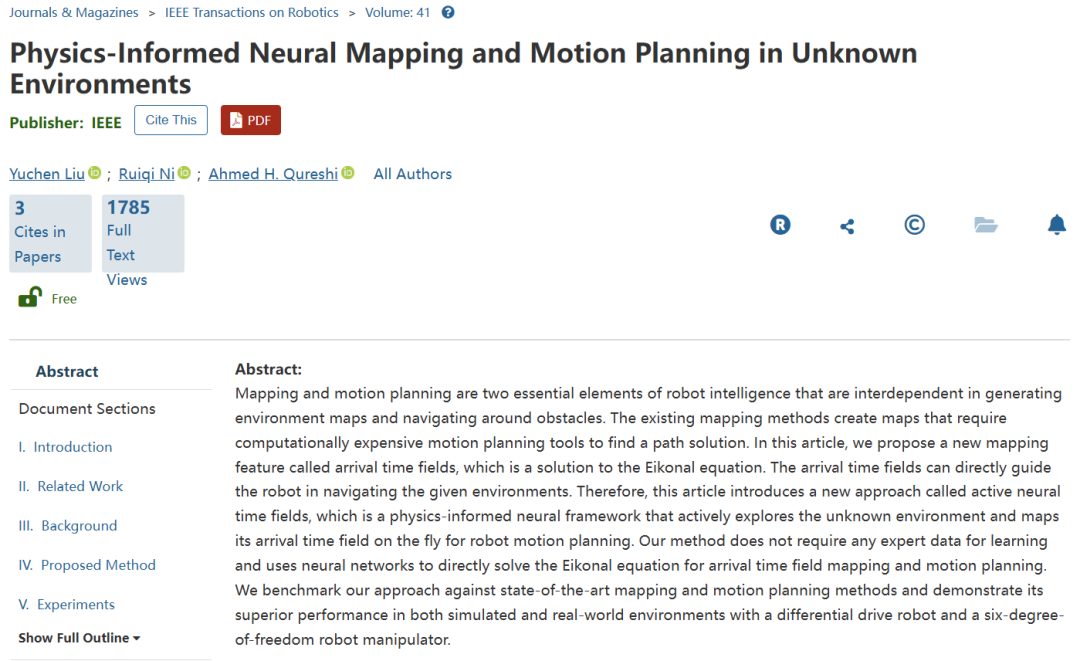
图1:Active NTFields整体流程图。
图1展示从传感器观测、C-space采样、神经网络预测时间场、速度场约束训练,到选择下一视角并规划路径的闭环流程。
✅ 亮点1:地图不再只是“障碍物表达”,而是能直接指导运动规划的时间场。
✅ 亮点2:无需专家轨迹数据,不依赖离线规划器生成监督标签。
✅ 亮点3:通过物理信息神经网络直接求解Eikonal方程,实现边探索、边建图、边规划。
✅ 亮点4:在TurtleBot4和UR5e真实实验中验证,规划速度可达0.02–0.03 s级别。
02 研究内容
🎯 2.1 问题切入:传统建图与规划之间仍有“断层”
传统机器人系统常采用“建图—规划”两阶段流程。建图模块输出占据地图、点云、SDF等环境表示;规划模块再基于这些表示调用采样规划或轨迹优化方法寻找路径。这种结构清晰,但计算代价不小,尤其当机器人需要频繁在同一地图中规划不同起终点时,规划器会被反复调用。
本文提出的到达时间场,本质上是一个面向规划的地图特征。给定起点和目标点,时间场描述从一点到另一点的最短到达时间,其梯度方向可以直接用于路径生成。因此,地图不只是“告诉机器人哪里不能走”,而是进一步告诉机器人“应该往哪里走”。

图2:论文的方法与 NTFields、P-NTFields、FMM 和 SD 在迷宫环境中生成时间场的比较。
该图直观展示本文方法与FMM、P-NTFields、NTFields、SD之间的差异,其中本文方法15 s即可恢复较准确时间场,而P-NTFields和NTFields分别需要18 min和10 min。
🧠 2.2 核心公式:用Eikonal方程把速度约束转化为时间场
论文将运动规划问题与Eikonal方程联系起来。Eikonal方程描述了速度场与到达时间场之间的关系,可理解为:机器人在不同空间位置具有不同“通行速度”,靠近障碍物时速度低,远离障碍物时速度高;时间场的梯度则反映路径推进方向。
核心关系可写为:

其中,




为了改善传统NTFields在障碍物附近梯度过陡、容易陷入错误局部极小的问题,作者提出新的时间场因式分解:

这一改动看似细节,但非常关键。相比原先 (1/au) 型表达,(log(au)^2) 在障碍物附近更平滑,不再依赖计算代价较高的Laplacian项,也不需要渐进式速度调度,从而使在线学习成为可能。
🧩 2.3 网络结构:从谱距离启发到神经时间场
作者的网络设计受到spectral distance的启发。简单理解,谱距离能够捕获空间的全局结构,虽然不一定精确等于最短路径时间,但具有较好的平滑性和全局一致性。
模型主要由四部分组成:
1. Fourier位置编码:增强网络表达高频空间特征的能力;
2. SIREN编码器:利用正弦激活函数表达连续且可微的C-space特征;
3. 对称算子:通过平方差操作保证从A到B与从B到A的时间场具有对称性;
4. 时间场生成器:输出因式分解变量 (au(q_s,q_g))。
图3:神经网络结构图。
🚀 2.4 在线学习流程:机器人一边探索,一边学习时间场
Active NTFields的在线过程可以概括为四步:
第一步,机器人从当前视角获取里程计和深度图或激光雷达数据;
第二步,从传感器射线中采样空间点,并估计这些点到障碍物表面的距离;
第三步,将采样点转换为C-space样本,构造速度监督信号;
第四步,在线训练神经时间场,并选择下一最佳视角继续探索。
论文中的Algorithm 1给出了完整流程。其思想并不复杂:每次观测都被加入记忆池,网络从新旧数据中采样训练,从局部观测逐渐形成全局时间场。值得注意的是,机器人前往下一视角时,不需要外部运动规划器,而是直接利用当前已学习到的局部时间场生成路径。

图4:Active NTFields在线学习伪代码。
📊 2.5 实验结果:速度优势非常明显
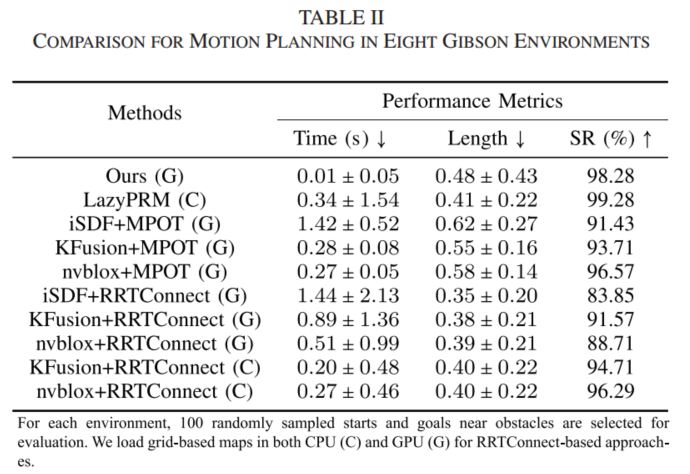
在Gibson室内环境中,本文方法与KinectFusion、iSDF、nvblox等建图方法,以及MPOT、RRTConnect、LazyPRM等规划方法进行了对比。结果显示,本文方法在建图时间上并非最快,但它学习的是可直接用于规划的arrival time field,因此后续规划速度优势明显。
在8个Gibson环境、共800组起终点测试中,本文方法平均规划时间约为 0.01 s,成功率约 98.28%。相比MPOT等方法,计算时间约快30倍,同时路径较平滑并与障碍物保持一定安全距离。
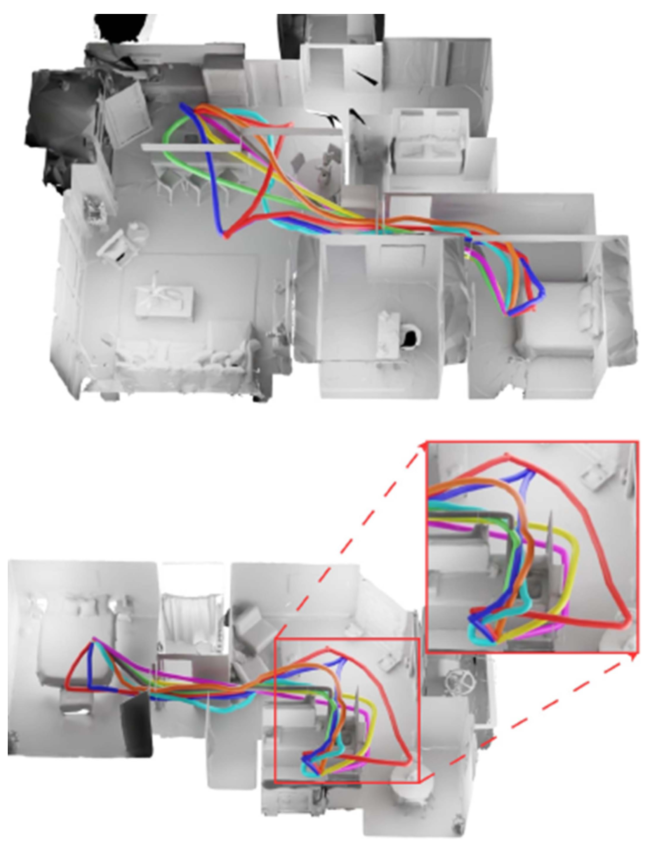
图5:Gibson环境中多种规划方法的路径对比与统计结果。
真实实验部分更能体现工程意义。TurtleBot4在室内家具环境中完成主动探索,用约65 s重构时间场,随后在0.02 s内完成从沙发附近到椅子后方目标点的路径规划。UR5e机械臂则在类似柜体的狭窄空间中完成6自由度C-space建图,规划平均时间约0.03 s,成功率91%。

图6:TurtleBot4真实室内环境探索与规划实验。
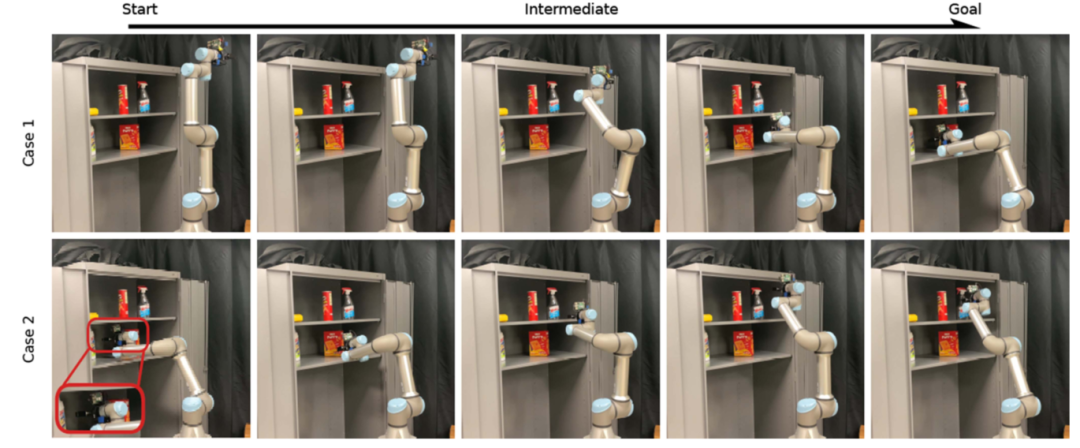
图7:UR5e机械臂在柜体狭窄环境中的运动规划实验。

03 创新点
🔍 3.1 从“环境地图”转向“规划地图”
本文最大的启发在于,它不再把建图看作单纯的几何重建,而是把地图设计成可直接服务规划的函数场。arrival time field既包含空间可通行性,也包含面向目标的路径信息,这使得建图结果天然具备规划能力。
⚙️ 3.2 新的时间场因式分解提升了在线训练效率
传统NTFields和P-NTFields虽然已经尝试用神经网络求解Eikonal方程,但训练慢、局部极小和复杂损失设计限制了在线应用。本文通过新的

🧠 3.3 物理信息学习减少了对专家数据的依赖
很多学习型运动规划方法依赖专家轨迹,而专家轨迹通常来自传统规划器,本质上仍离不开昂贵的数据生成过程。本文利用Eikonal方程和速度场约束训练网络,不需要专家路径监督,这一点对未知环境中的自主机器人尤其重要。
🤖 3.4 同一框架覆盖移动机器人与机械臂
论文不仅验证了二维/三维室内导航,还展示了UR5e在6自由度C-space中的规划能力。对机器人控制领域而言,这说明arrival time field不是简单的平面导航技巧,而有潜力成为高维构型空间规划的一类通用表达。
04 总结与展望
这篇TRO论文的价值,不只在于提出了一个更快的规划器,而在于重新思考了“地图”在机器人系统中的角色。过去,地图通常是规划器的输入;而在Active NTFields中,地图本身就是一种可微、连续、带方向信息的规划场。机器人在未知环境中不再只是被动记录障碍物,而是在探索过程中逐步学习“如何到达目标”。
当然,本文也存在进一步拓展空间。例如,在超大规模环境中,连续学习可能面临遗忘与效率问题;神经网络的谱偏置也可能影响对高频细节和复杂窄通道的表达;此外,如何与硬件加速规划、户外自主驾驶、动态障碍物环境结合,也值得继续深入。
🔭 未来研究将聚焦于以下几个方向:
1. 面向大规模环境的持续学习机制,提升长时间探索中的记忆保持与增量更新能力;
2. 缓解神经网络谱偏置问题,增强对复杂边界、窄通道和高频空间结构的表达;
3. 融合硬件加速运动规划技术,进一步探索微秒级规划的可能性;
4. 扩展到户外复杂场景与自动驾驶任务,减少对专家示范和离线路径数据的依赖;
5. 面向动态环境的时间场更新机制,使机器人能够应对移动障碍物和实时场景变化。
未来机器人系统中的“建图模块”和“规划模块”是否还需要严格分开?
声明:本文仅供学术交流,版权归原作者所有。如有错误或侵权,请联系更正或删除,欢迎留言探讨。