太平洋智驾大横评 的AEB测试很有料,可以引发我们对AEB功能的思考,简单讲两个场景。
第一个是右转场景的全向AEB测试中,不少车型在SR上明明清晰识别了障碍物,但在人驾条件下就是不触发AEB导致撞上。如果处于辅助驾驶状态,同样的场景,它因为看到了、所以绝对不会撞上。
已经清晰识别到了、而且明明可以刹住,为什么不同状态下车辆的反应不一样呢?
在人驾状态下,AEB 系统通常只是作为“最后一道防线”,其职责是“帮到你算我的功劳,帮不到你也很正常,但务必不要错误触发给驾驶员添麻烦”。右转场景下,侧向障碍物的感知置信度要弱于前向。如果前向感知的置信度有99.99%,那侧向可能只有99%,基于“务必不要错误触发给驾驶员添麻烦”的原则,AEB系统就有可能放任不管。
辅助驾驶状态则不一样,其驾驶权暂时由车辆主导,其职责是“在不要引发事故的前提下完成出行任务”。别说置信度99%了,就算只有5%的可能性要撞人,它也会减速甚至刹车。
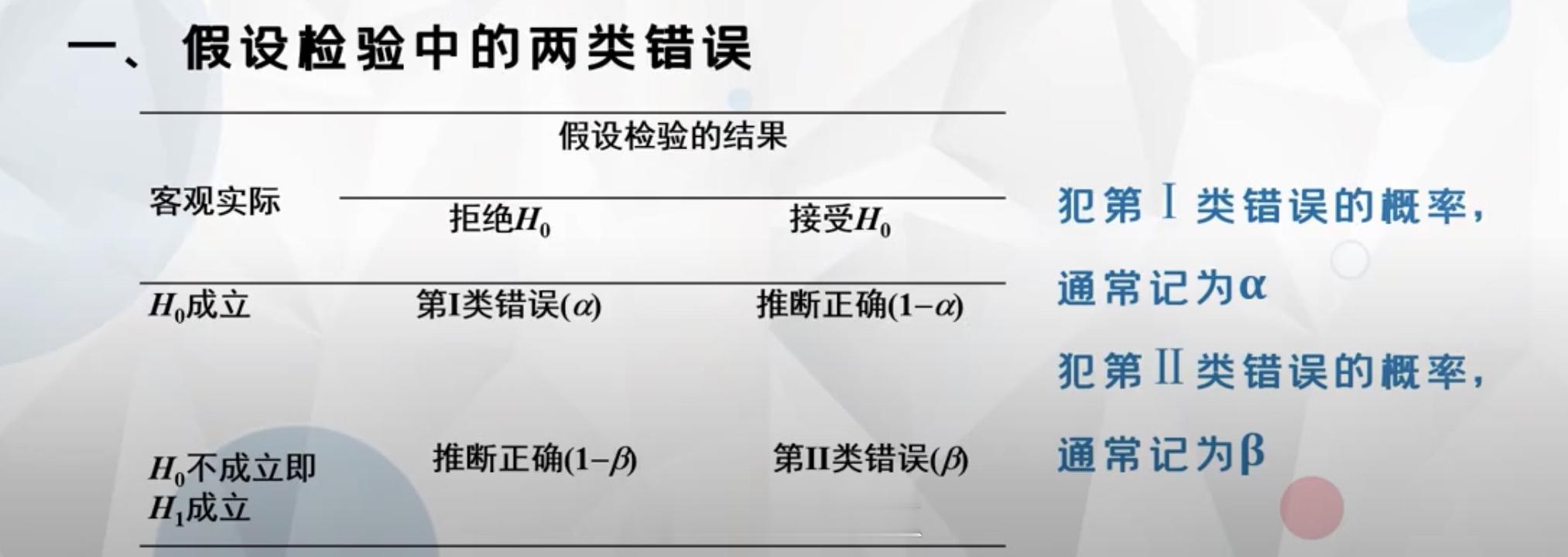
所以我们可以认识到,同一场景下的AEB的表现不同,并不能粗暴地判断它的能力高低,有可能只是它对自己职责理解有所不同、在第1类与第2类错误之间的取舍有所不同。
第二个是雨夜AEB的测试,有几款车去年的成绩不错,可以实现100km/h刹停;今年OTA了版本,却全部沦陷就算是低速也刹不住。为什么? 怎么会越OTA越差呢?
太平洋汽车与开发团队一起调查后发现,这并不是版本的退步,而是一种进步:去年100km/h虽然能刹住,但没有做摄像头遮蔽故障的判定逻辑;今年加上了这一逻辑,减少了误触发AEB的概率,但在雨夜状态下摄像头遮蔽太严重,就禁用了AEB。
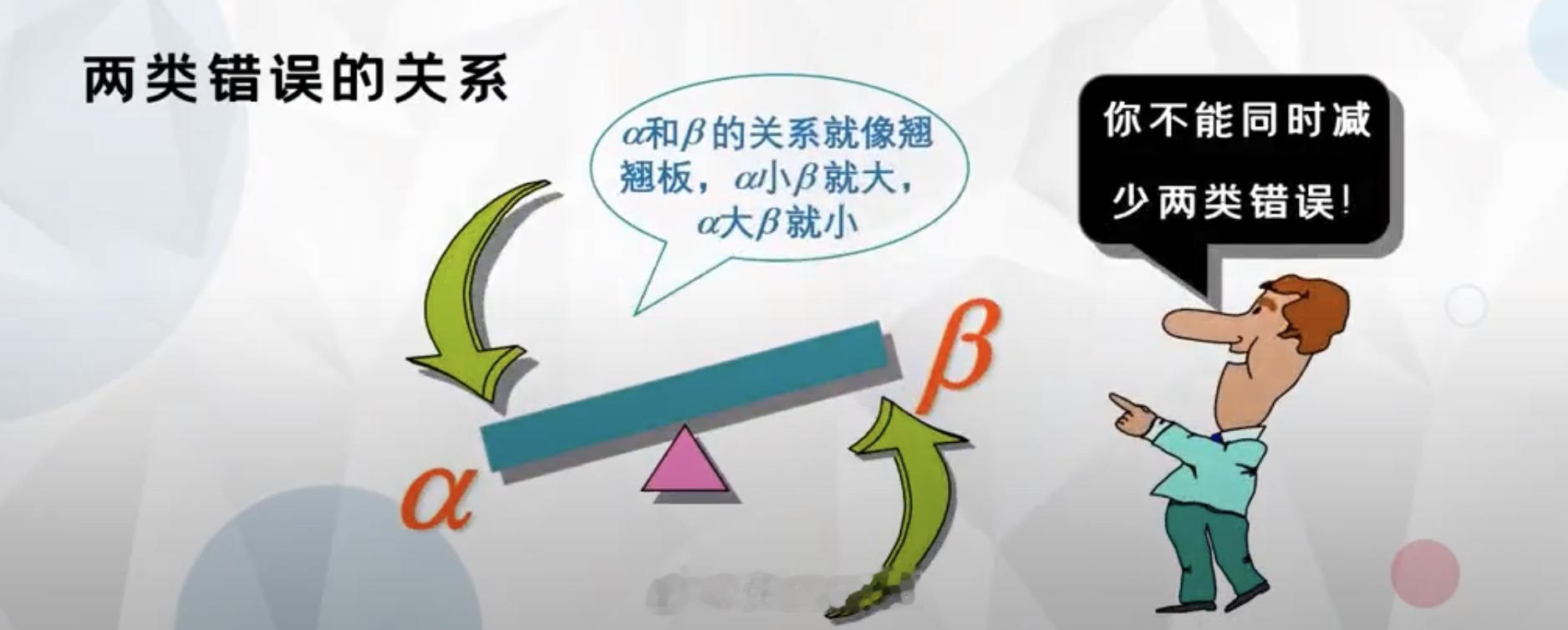
如图三所示,这相当于在减少第II类错误的同时,增加了第I类错误。这是不可避免的,因为无法同时降低两类错误的概率。当然,根据具体场景还是存在优化空间,可以在两类错误中找到一个更优的点,果然该团队在4月OTA之后,既考虑了摄像头遮蔽故障的判定逻辑、降低了误触发AEB的概率,同时还能做到雨夜90km/h刹停。
这给我们带来的启示是,评价AEB和评价领航辅助功能的逻辑是不一样的。评价AEB要看它该触发时的表现如何,也要看它不该触发时的表现如何。而通常的测试项目中,只能测试前者。这类测试是具有很强的参考价值的,前提是观众认识到这只是测试了其中一个面,不能根据一个面来判断整体好坏。 AEB
原视频: