作者|周松
原创首发|蓝字计划
机器人行业,已经卷到指甲盖了。
过去两年,灵巧手公司拼手指、拼关节、拼自由度,先想办法让机器人长出一双越来越像人的手。
如今,十几、二十个自由度已经不算少见,机器人也能端杯子、抓水果、叠衣服。但真正碰到东西以后,它们依然像一个没怎么干过活的新手。
哪怕是“夹鸡蛋和塑料袋的时候分别要用多少力、抓玻璃杯时会不会滑”,这些对人类来说近乎本能的事,大部分灵巧手依然很难稳定做好。
归根究底,是灵巧手只模仿了人手的“表面”——五指、关节,却缺少了人手的“灵魂”:
手感。
这也让灵巧手的竞争,从手掌、关节和手指,一路卷进了指尖;甚至让雷军旗下的小米战投,也忍不住在一根拥有“手感”的指尖上押了注。
2025年,纬钛机器人完成近亿元天使轮及天使+轮融资,其中天使轮由小米战投领投。最近,纬钛又宣布完成Pre-A轮融资,一年之内连融三轮,累计融资数亿元。
而这家让资本追着下注的公司,成立时间也不过两年。
小小一根指尖,凭什么成了灵巧手下一轮竞争的入口?
小小指尖拿捏机器人变现命脉过去几年,灵巧手不断增加手指、关节和自由度,机器人能够完成的动作也越来越复杂。
但这些能力,大多建立在物体位置、形态和操作流程相对固定的前提下。
真正进入工厂、家庭等真实场景,情况随时都可能发生变化:零件可能偏了几毫米,杯子表面可能沾了水,塑料袋的形状每次都不一样,水果的软硬程度也各不相同。

图源:纬钛机器人官网
这时候,光靠提前规划好的动作,很难保证每一次操作都能成功。
摄像头可以告诉机器人,眼前是一个杯子、一个零件或一个鸡蛋,却很难持续判断接触之后发生的变化。
在工业生产线上,缺少这些反馈,机器人可能夹坏零件,也可能因为一点位置偏差,无法完成插接和装配。
到了家庭场景,面对柔软、透明、易碎和形状不固定的物体,提前写好的动作程序就更容易失效。
这时候,指尖触觉解决的,就是机器人碰到物体以后,能不能根据变化随时调整。
这也是“手感”对于机器人真正的价值。
这种价值,已经在一些精细操作中得到验证。
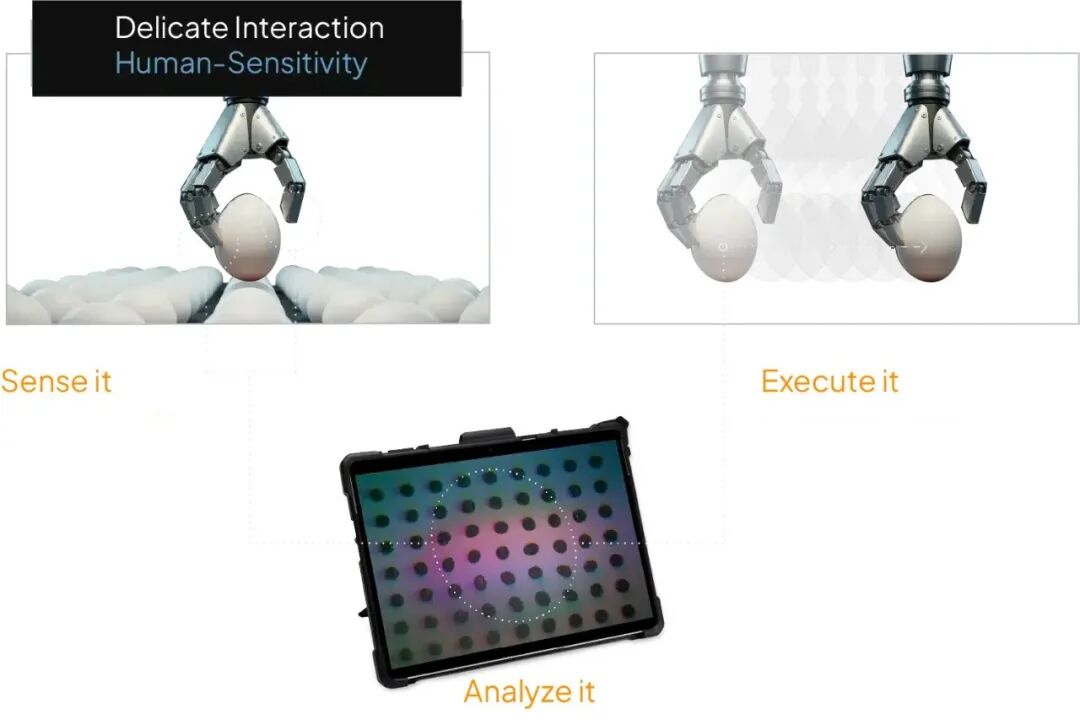
此前,MIT研究团队曾在机器人夹爪的指尖装上GelSight传感器,让机器人一边感知线缆在手指间的位置和摩擦力,一边调整夹持力度。
最终,机器人不仅能沿着一根随意摆放的线缆找到末端,还能感知插头接触手指的瞬间,重新调整姿态,将插头插进接口。
相比之下,只按照预设动作运行的开环方案,只能沿着线缆移动约36%的长度,线缆一旦弯曲,就很容易从手中滑走。
这种能力,也开始进入头部科技公司的产品路线。
早在2024年,Meta 就曾一次性发布了人工触觉指尖Digit 360、触觉基础模型Sparsh,以及整手触觉集成平台Digit Plexus。

图源:Meta官网
其中,Sparsh使用超过46万张触觉图像进行预训练;Digit 360则把超过18种感知能力塞进一根人工指尖,还能在本地处理触觉信息,像人的神经反射一样快速作出反应。Meta随后又与GelSight、Wonik Robotics合作,推动搭载触觉传感器的新一代Allegro Hand商业化。
到2025年,Figure发布新一代人形机器人Figure 03时,也专门自研了指尖触觉传感器。按照Figure的说法,此前市面上的传感器,很难同时满足真实使用中的耐用性、长期稳定性和感知精度。

图源:Figure官网
这套传感器能够感知约3克的压力变化,并判断物体已经抓稳,还是即将从手中滑走。到了2026年发布的Helix 02,指尖触觉已经和头部相机、手掌相机一起,成为机器人控制模型的直接输入。
当然,灵巧手的触觉由传感器提供的,理论上触觉传感器也可以铺满手掌和手指,只是这样一来成本、布线、数据带宽和算力压力也会随之增加。
一项在Shadow Hand仿真环境中进行的研究发现,经过优化后,仅用21个触觉传感点,就能保留92个传感点方案超过93%的任务表现。
这意味着,触觉传感器不需要简单铺满整只手,真正重要的是把有限的传感能力,放到与具体任务最相关的位置。
这也解释了为什么灵巧手的指尖,成了养育机器人“手感”的兵家必争之地。
而纬钛机器人盯上的,正是这个位置。
一根指尖,要喂一套触觉数据纬钛机器人能盯上这个位置,和创始人李瑞过去十多年的研究经历有关。
李瑞毕业于美国麻省理工学院(MIT)计算机科学与人工智能实验室,师从美国两院院士、人工智能领军人物Edward Adelson教授。
在MIT期间,李瑞参与了GelSight指尖传感器的研发和小型化,将视触觉技术进一步应用到机器人夹爪和精细操作中。
图源:GelSight官网
而所谓的视触觉,原理其实就是在传感器内搭载一层仿人体皮肤的柔性体。
接触物件时,柔性体会产生形变,内置的微型相机会实时捕捉形态变化,再依靠算法解析,还原出压力、表面纹路、滑移状态等触觉信号。
2024年,纬钛机器人正式成立,开始深化GelSight视触觉传感器技术的研发和应用。
其中,就有专为灵巧手打造的视触觉仿生指尖GF515。
图源:纬钛机器人官网
这款产品在仅15×27毫米的指尖空间内,实现了高分辨率触觉成像、高频率感知以及多维力信息的同步获取。
夸张的是,虽然整体重量不足15克,却能够输出每平方厘米上万点级别的触觉信息密度。
更重要的是,它除了能判断有没有接触,还能进一步识别接触过程中的压力分布、滑移状态以及力的变化方向,让机器人读懂手指正在发生什么。
对于一根指尖来说,要把这些能力同时塞进如此有限的空间并不容易。
传感器既要足够小,不能影响灵巧手本身的结构和运动;又要保持足够高的分辨率和响应速度,赶在物体滑落或变形之前,把变化反馈给机器人。
也正是这套能力,让GF515很快进入产业和资本的视野。
纬钛机器人的投资方大多带有明显的产业背景。
韦豪创芯是豪威集团旗下产业投资平台,宁波吉德背后有小米战略投资;领屹投资、永鑫方舟等机构,也长期深耕硬科技和高端制造领域。
相比单纯提供资金,这些投资方还能带来芯片、制造和下游应用等产业资源。
更直接的验证,已经出现在生产线上。
据纬钛机器人披露,小米智造的手机产线已经开始规模化引入纬钛的视触觉传感器,用于高精度零部件装配。
国内一家百亿估值灵巧手厂商的新一代产品,也已经搭载纬钛的视触觉指尖方案,用来提升精细操作能力。
不过,给机器人装上一根会感知的指尖,只解决了“感觉得到”的问题。想让机器人真正积累出老师傅一样的手感,还要把每一次接触中的压力、滑移和形变,沉淀成可以反复训练的数据。
正因如此,纬钛推出了VT-UMI85视触觉数据采集系统。

图源:纬钛机器人官网
这套设备重量约500克,可以脱离实验室,在真实任务中同步采集视触觉、图像、位姿和夹持状态等信息,并完成后续的回放、训练和评估。
在此基础上,纬钛还联合国家地方共建人形机器人创新中心,发布了跨本体视触觉多模态数据集“白虎-VTouch”。
从GF515到VT-UMI85,再到“白虎-VTouch”,纬钛想做的,是把一根指尖变成触觉数据的入口。
但指尖采集数据越多、用得越久,新的问题也会随之出现。
卷到指尖之后,硬仗才开始视触觉指尖想真正进入生产线,首先要过耐用这一关。
视触觉传感器通常依靠柔性体或触摸膜感知形变,这些材料在高频使用中容易磨损、污染和老化,内部的光学组件也可能因此出现偏差。

图源:纬钛机器人官网
在实验室里完成几百次抓取,和在生产线上连续工作几个月,完全是两回事。
一旦柔性材料频繁更换,或者使用一段时间后,采集到的信号开始出现偏差,传感器带来的精度优势,很可能会被后续的维护成本抵消。
另一个问题,是算力。
相比部分只输出单一压力数值的触觉传感器,视触觉传感器采集的是一连串高频、连续变化的图像和力学信号。
每一次接触发生后,系统都要在极短时间内识别压力分布、滑移趋势和物体形变,再把结果传给机器人的控制系统。
哪怕只装在一根手指上,持续产生的高频图像和触觉数据量也已经不小;扩展到五指以后,数据带宽和实时计算压力还会继续增加,这对企业的算力需求就会非常高。
而且在耐用、算力之外,成本和量产一致性的问题同样绕不开。
单根指尖搭载一套高分辨率视触觉模块,和五根手指、手掌等位置都铺上触觉,最终的成本完全不同。

图源:纬钛机器人官网
传感器还要被塞进尺寸各异的手指里,保证每一颗的感知效果、使用寿命和输出信号尽量一致,这对材料、封装和批量制造都提出了更高要求。
对纬钛机器人来说,只有逐一解决这些问题,视触觉才能真正走向大规模商业应用。
纬钛机器人虽然抢到了先手,但整个指尖触觉赛道,并没有给它留下多少慢慢解决问题的时间。
汇光创新推出的超薄视触觉传感器LIGHT TILE,第一版产品厚度就控制在3至4毫米,希望降低传感器进入灵巧手的空间门槛。
新智具身则把重点放在耐用性上,通过模块化设计,让传感器可以支持24小时高强度连续使用。
东莞感知纪元主攻弹性多模态仿生电子皮肤,材料拉伸延展性可以达到400%以上,试图让触觉覆盖更多曲面和柔性结构。
帕西尼、戴盟机器人等公司,也在围绕多维触觉、灵巧手和触觉数据持续扩张产品线。
与此同时,整个赛道资本的动作同样越来越密集。
据行业不完全统计,2025年,国内触觉传感器赛道完成融资约20起,已披露融资总额接近18亿元。进入2026年,汇光创新、新智具身、戴盟机器人等公司又相继宣布完成融资。
这说明,指尖触觉已经开始从实验室里的技术演示,进入工程化和规模化竞争。
过去,大家比的是谁能让机器人拥有“手感”;接下来,竞争会落到更具体的问题上:
谁的指尖更薄、更耐用,成本更低,还能持续采回稳定的数据,谁就更接近成为赢家。