何小鹏又得输给余承东了。关于自动驾驶,何小鹏跟余承东一直存在分歧。何小鹏坚持纯视觉方案,而余承东则坚持基于激光雷达的融合感知方案。何小鹏认为应该从L2跳过L3,直接进入L4阶段,而余承东则认为应从L2进入L3阶段,L3不能跳过。为此,双方争论了很久。
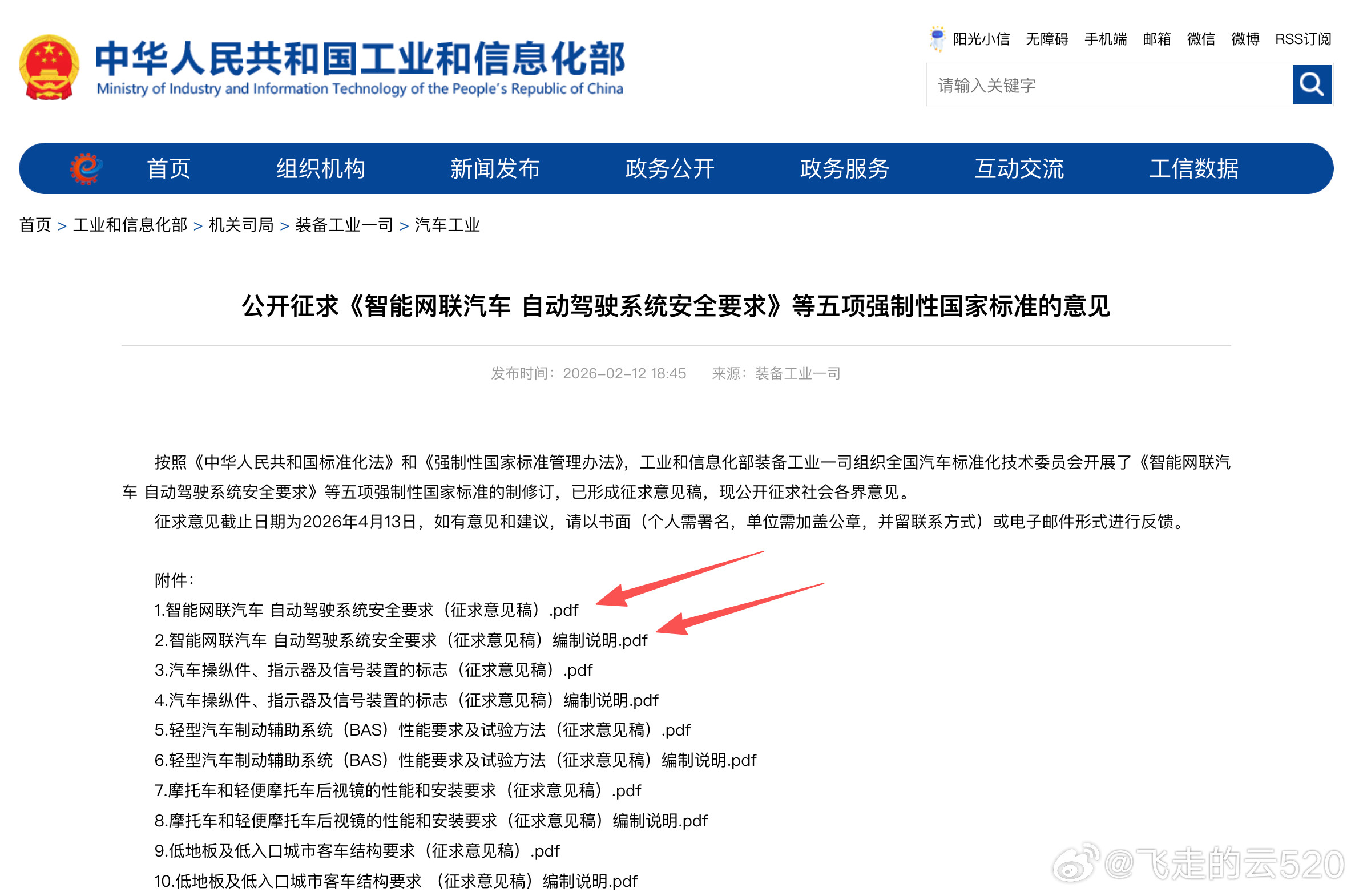
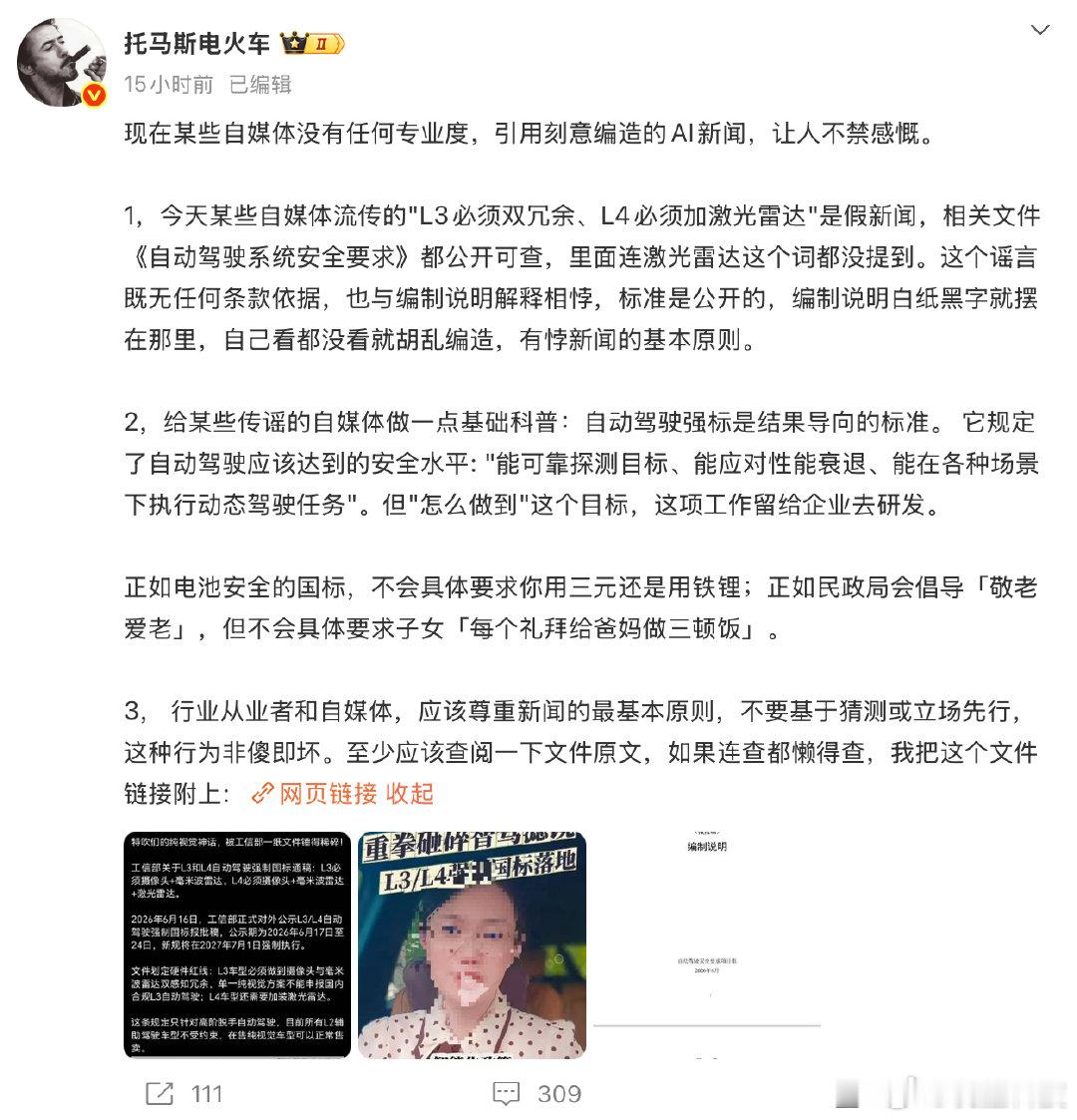
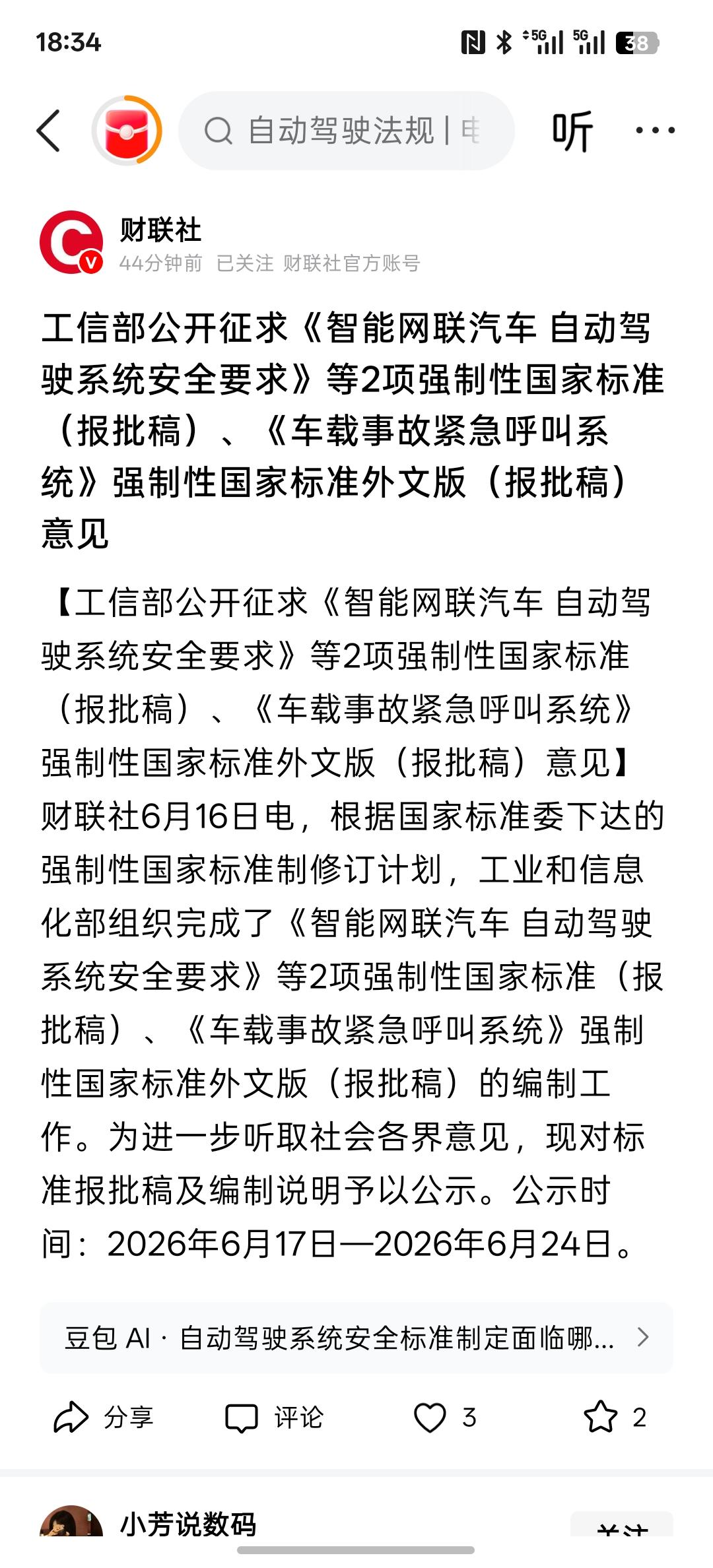
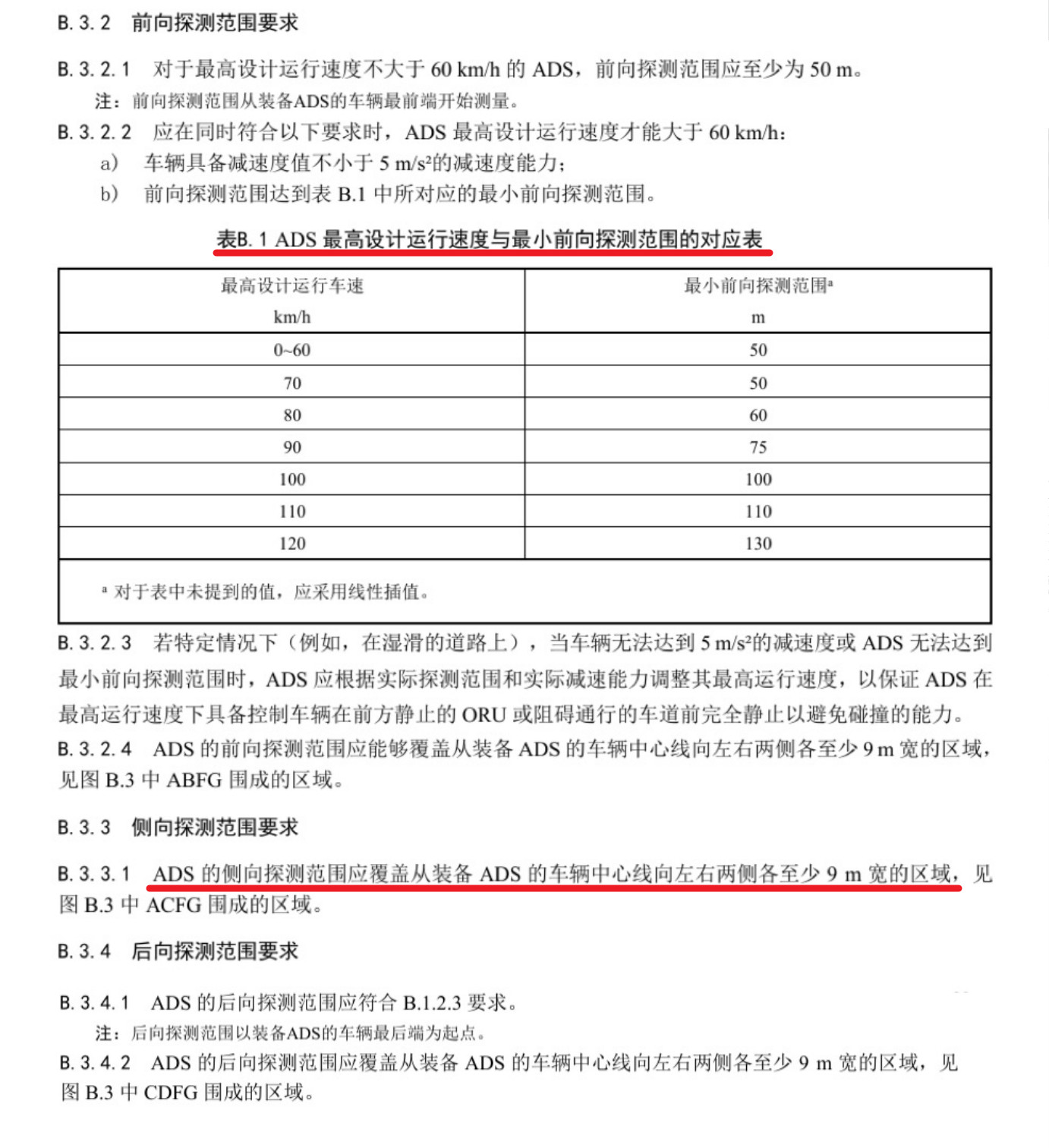
如今,关于L3/L4 强制国标已经公示。根据这个《智能网联汽车自动驾驶系统安全要求》标准,L3要求异构双传感器冗余,而L4则要求三重异构冗余,这样纯视觉方案既无法达到L3的标准要求,也无法达到L4的标准要求。所以,这一回合余承东又赢了。
何小鹏与余承东的第一回合,余承东认为何小鹏不懂AEB。这第二回合,何小鹏可能不清楚华为是自动驾驶标准的主要起草单位之一,所以又输了在所难免。
评论列表