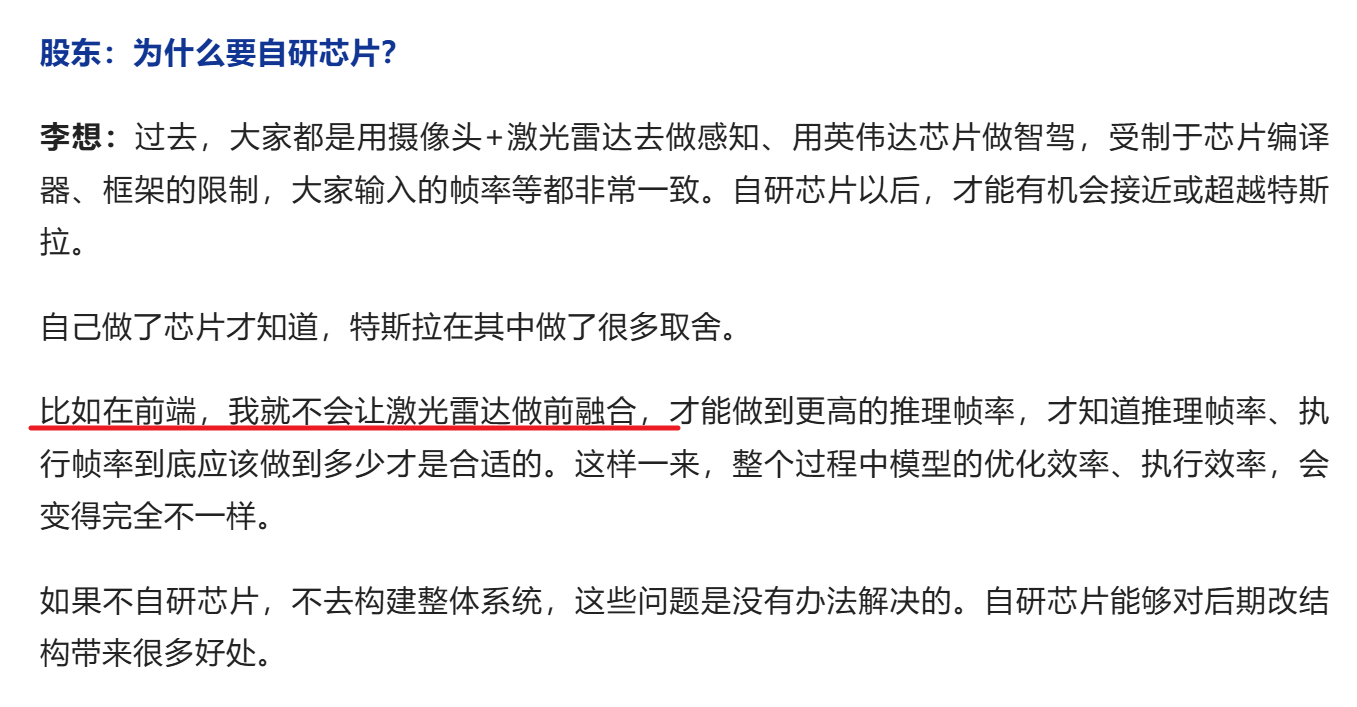
李想称前端不做激光雷达前融合,雷达成摆设了?
聊聊我的看法:
智能驾驶的感知融合,主要分三种:数据级前融合、特征级中融合、目标 / 决策级后融合。
简单说,前融合就是把传感器原始数据直接打包交给 AI 运算。融合层级越靠后,数据加工得越多,到了目标级融合,各个传感器数据已经独立形成判断了。
数据级前融合的好处是信息几乎零损耗,但缺点也很突出 —— 运算速度慢。尤其是激光雷达的原始点云,数据量巨大,特别拖节奏。
其实李想的想法很好理解:整套感知系统以视觉为主力,激光雷达不再参与最前端的原始数据融合,放到特征级或是后融合阶段再介入。
这么做首先能保证智驾反应更快、运行效率更高,激光雷达则负责补全信息、校验结果,同时充当安全兜底。
说白了就是主链路拼速度,冗余链路保稳妥。
再加上自研芯片的加持,系统的响应效率还能再往上提一截。
理想汽车新能源汽车大v聊车